

Longitudinal and transverse coupled intelligent vehicle trajectory planning method and system
A trajectory planning and intelligent vehicle technology, applied in the direction of vehicle components, external condition input parameters, control devices, etc., can solve problems such as not considering vehicle coupling, exceeding vehicle dynamics capabilities, and failing to fully improve vehicle economy and environmental protection. Achieve the effect of reducing emissions and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
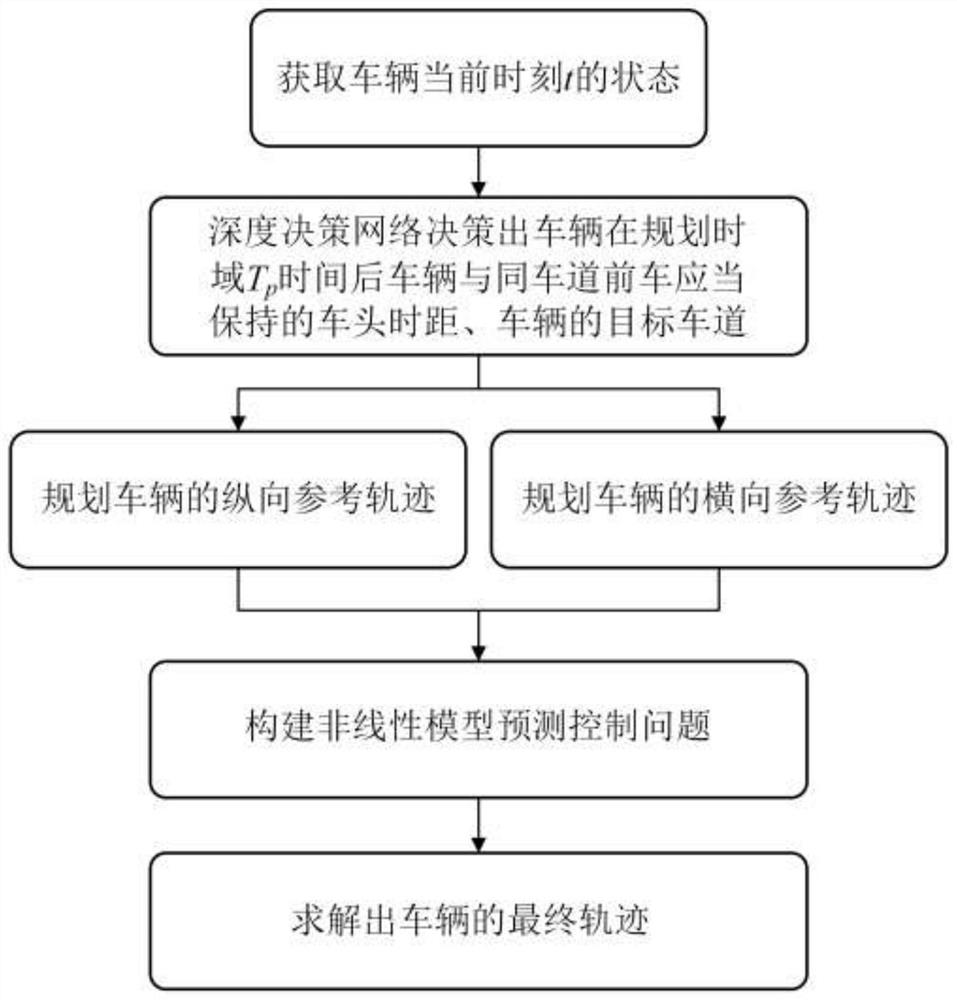
[0052] refer to figure 1 As shown, a kind of vertically and horizontally coupled intelligent vehicle trajectory planning method of the present invention, the steps are as follows:
[0053] 1) Obtain the state of the vehicle at the current time t; use the deep decision-making network method to determine the vehicle's state in the planning time domain T p The headway distance that should be maintained between the vehicle and the vehicle ahead in the same lane after time the target lane of the vehicle;
[0054] The state X of the vehicle at the current moment t in step 1) t for:
[0055]
[0056] where x t , Respectively, the longitudinal position, longitudinal velocity and longitudi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More