

Long-time and long-distance remote control method for ground mobile robot based on double-rocker handle
A mobile robot and dual rocker technology, applied in the field of human-computer interaction, can solve problems such as difficult joystick precise operation, task execution restrictions, and influence on follow-up operations, so as to maintain forward speed, ensure ease of use, and reasonable type design Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Next, the technical solutions in the embodiments of the present invention will be described in connection with the drawings of the embodiments of the present invention, and it is understood that the described embodiments are merely the embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those of ordinary skill in the art are in the range of the present invention without making creative labor premise.
[0054] Embodiments of the present invention will be described in detail below with reference to the accompanying drawings:
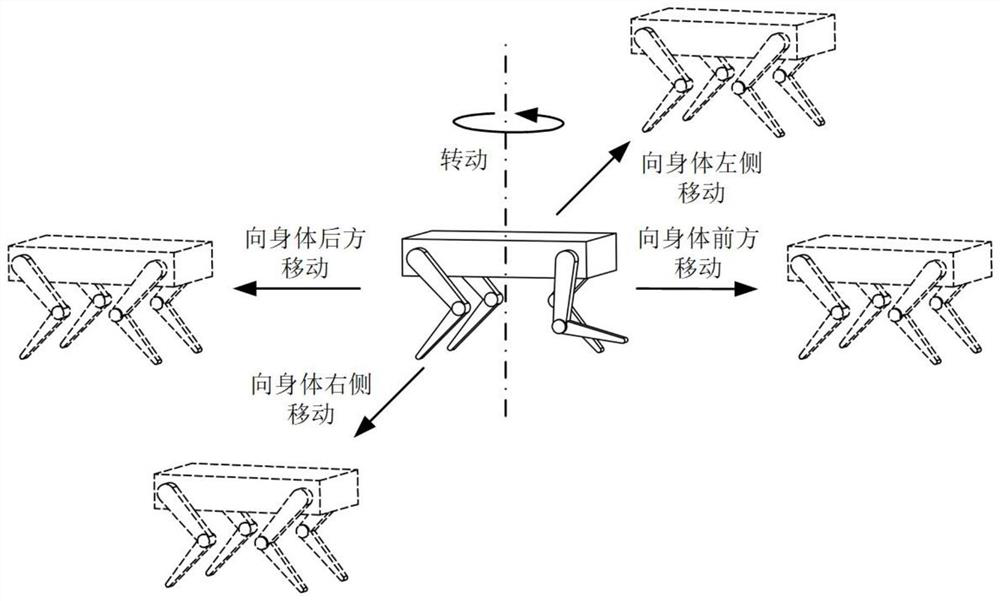
[0055] like figure 1 As shown, a long-term long distance remote control method based on the bipper handle of the bipper handle, the ground moving robot applied, has the ability to move in the front and rear direction of the body and the left-right direction, and the steering ability. The floor moving robot of the four-legged form can be moved in any direct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More