

Ground vehicle path planning method based on maneuverability evaluation
A technology for vehicle routing and mobility, applied to road network navigators, measuring devices, instruments, etc., can solve the problem of identifying, not taking into account the number of times the vehicle goes uphill, the cumulative uphill length of the road curvature, and maneuvering without considering the effect of soil mechanics Performance and other issues to achieve the effect of ensuring mobility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
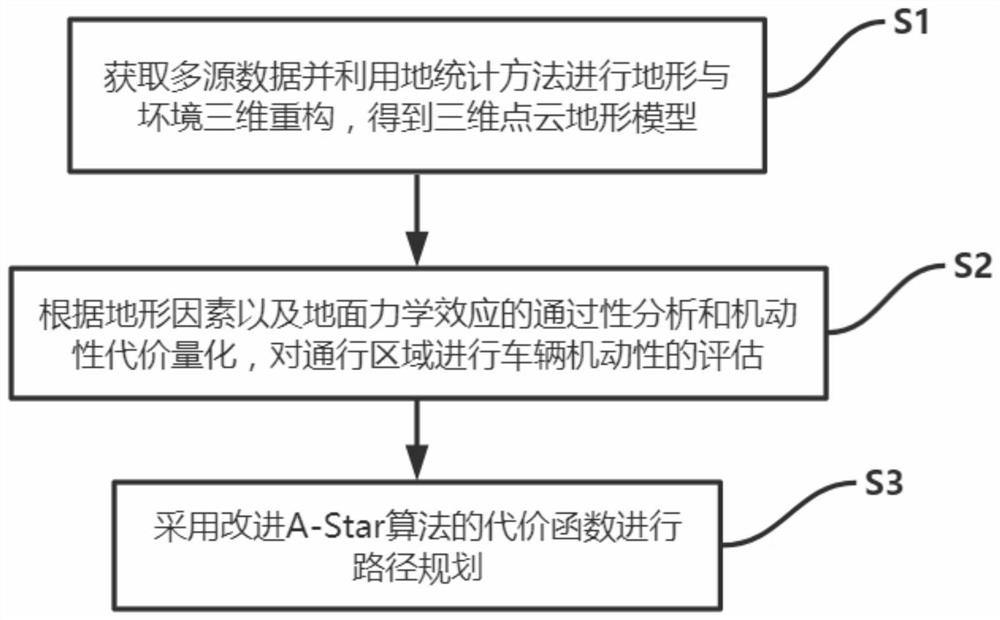
[0056] Please refer to figure 1 , in an embodiment of the present invention, a ground vehicle path planning method based on mobility assessment, comprising:
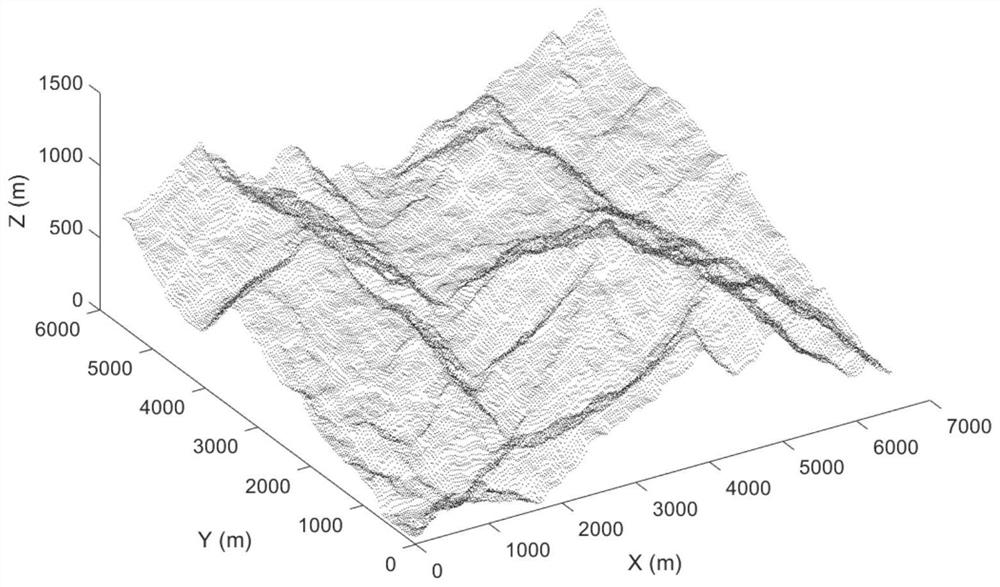
[0057] S1. Obtain multi-source data and use geostatistical methods to perform three-dimensional reconstruction of terrain and environment to obtain a three-dimensional point cloud terrain model. The multi-source data includes acquisition of remote sensing elevation terrain data, land use data, and soil t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More