

Robot dynamic gesture recognition method based on hidden Markov model and device thereof
A hidden Markov, dynamic gesture technology, applied in the field of human-computer interaction gesture recognition, can solve problems such as gesture interference and affect gesture recognition, and achieve the effect of reducing the amount of data storage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
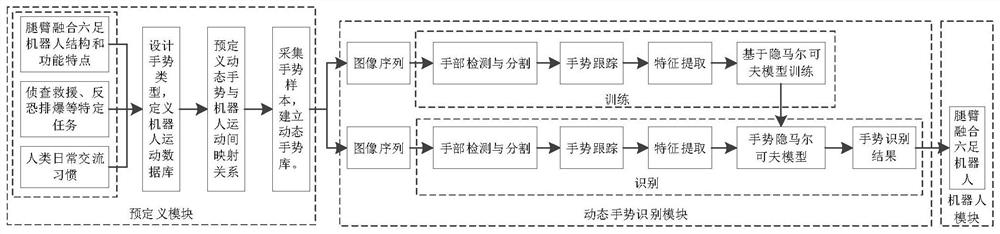
[0052] The purpose of human-computer interaction in the present invention is to enable the leg-arm fusion hexapod robot to understand human intentions through gestures, and then let the robot perform corresponding tasks.
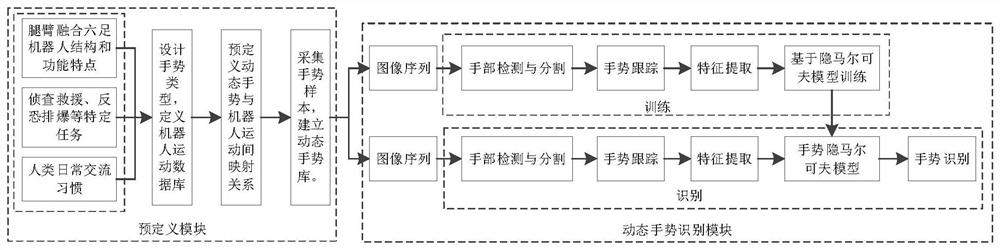
[0053] The robot dynamic gesture recognition method based on the hidden Markov model of the present invention includes two modes: an offline mode and an online mode. The online mode flow chart is as follows figure 1 As shown, the offline mode flow chart is as follows figure 2 shown. Among them, the offline mode uses the test data set to test the gesture recognition results, and only realizes gesture recognition. The online mode reads the data collected by the camera installed on the robot in real time, uses the trained model to recognize gestures in real time, and sends the recognition results to the robot module to control the robot to complete specific tasks.
[0054] For the online mode, the interaction between human and robot is performed based on co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More