

Multi-modal motion bionic inchworm crawling and climbing soft robot
A bionic ruler and multi-modal technology is applied in the field of climbing software robots and multi-modal motion bionic inchworm crawling. Achieve the effect of enhancing bending deformation ability, expanding motion adaptability and motion range, and good anchoring effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0054] The invention provides a multi-modal motion bionic inchworm crawling and climbing soft robot, which includes feet and three deformable bodies sequentially connected between two of the feet; the deformable bodies have stretchable surfaces 18 and an inextensible surface 19, the extensible surface 18 is located on the opposite side of the inextensible surface 19 so that the deformable body can be deformed between a straight structure to a C-shaped structure, wherein the straight structure is as Figure 5 As shown, the C-shaped structure is as Figure 6 , Figure 7 As shown, and the deformable body can be in any state during the deformation process from a straight structure to a C-shaped structure, such as Figure 4 As shown, three states in the deformation process of the deformable body are shown. In practical applications, there are multiple different states in the deformation process from the straight-shaped structure to the C-shaped structure, and the deformable body can...
Embodiment 2
[0058] This embodiment is a preferred example of Embodiment 1.
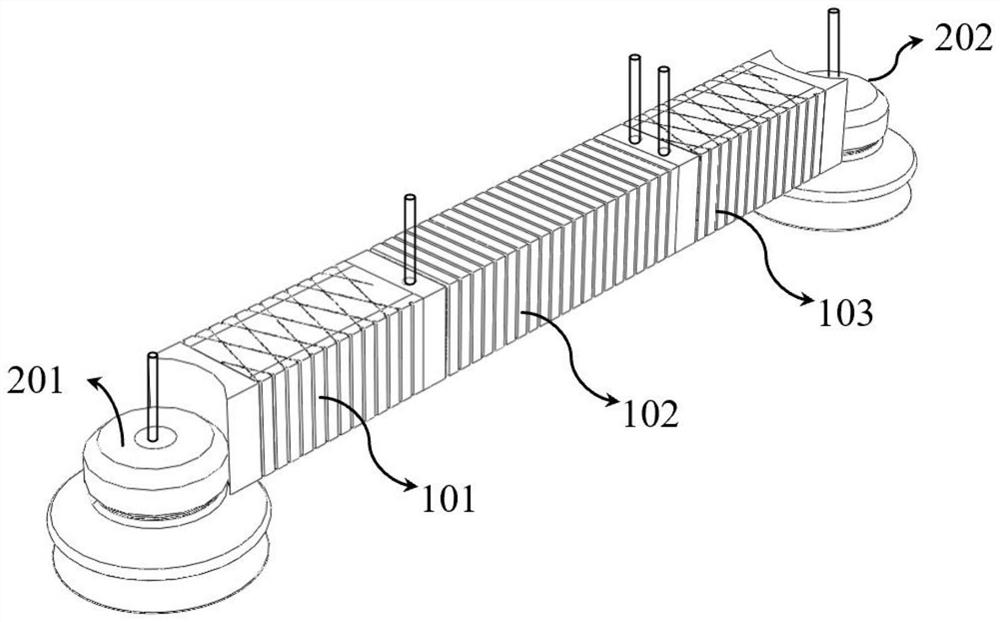
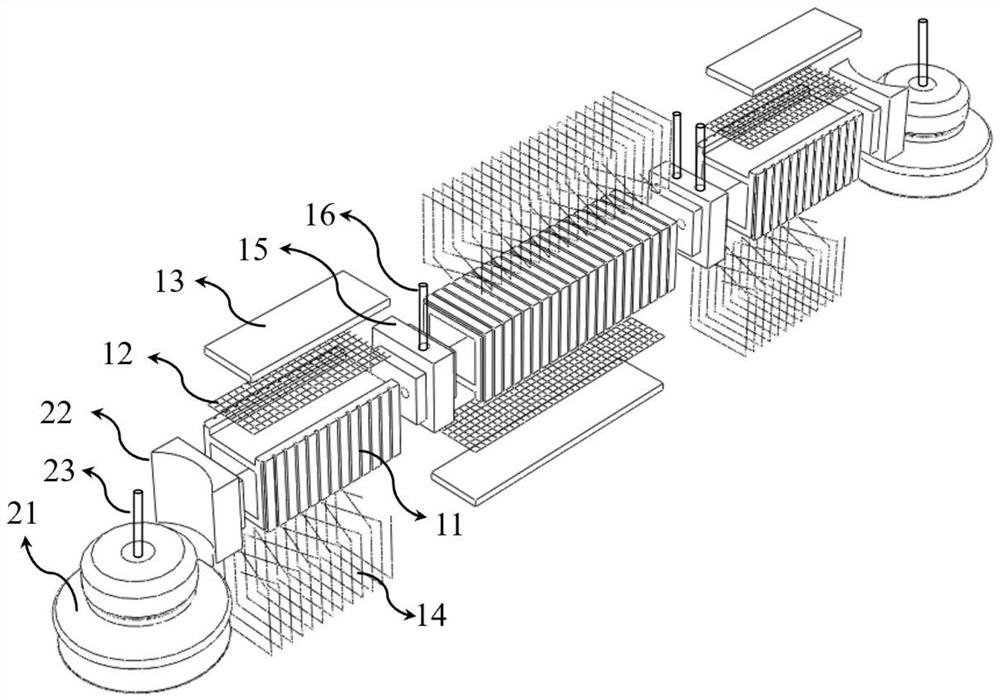
[0059] In this example, if figure 1 , figure 2 , image 3 , Figure 8 As shown, the three deformable bodies respectively adopt the first fiber-reinforced pneumatic artificial muscle 101, the second fiber-reinforced pneumatic artificial muscle 102, and the third fiber-reinforced pneumatic artificial muscle 103, and the feet at the front and rear ends respectively adopt the first adsorption foot pads 201 1. The second adsorption foot pad 202 and the perforated connector 15 are connected to the first air pipe 16, and the negative pressure suction cup 21 preferably adopts a corrugated double-layer silica gel structure.
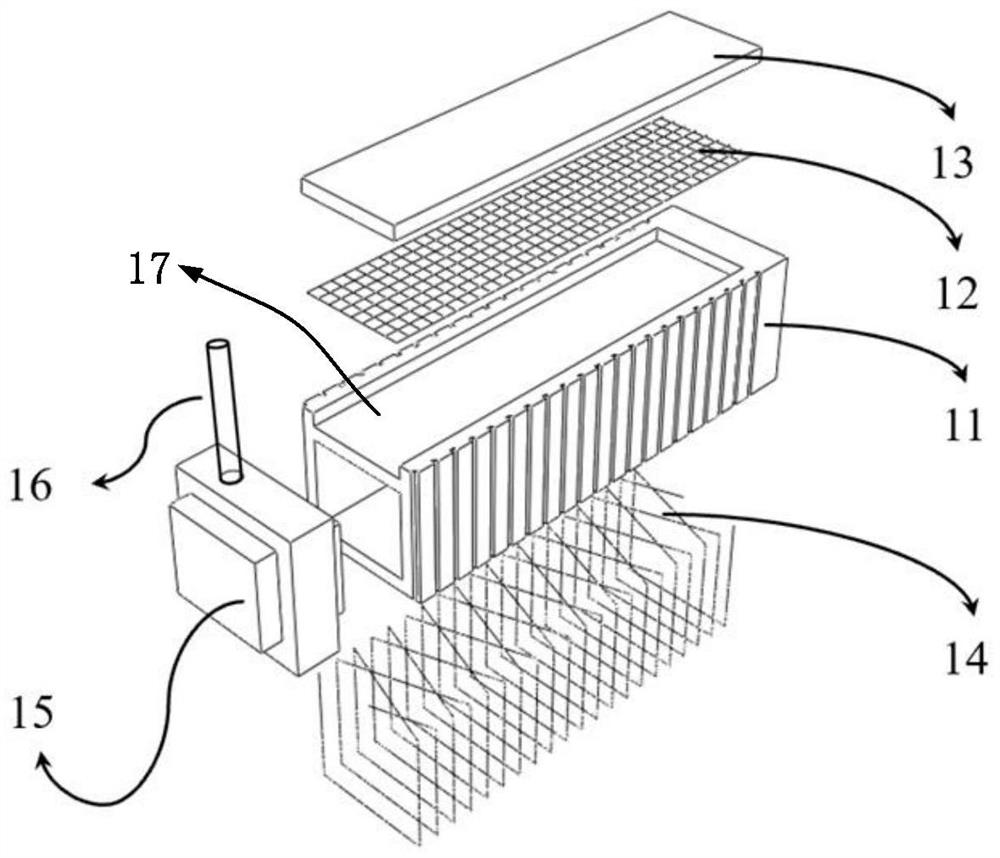
[0060] The deformable body includes a silicone cavity 11, a restrictive layer 12, a secondary casting layer 13, and reinforcing fibers 14. The silicone cavity 11 has a groove 17 corresponding to the part of the inextensible surface 19, and the restrictive layer 12 is placed The secondary pouring...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More