

Unmanned aerial vehicle obstacle avoidance method based on deep reinforcement learning
A technology of reinforcement learning and unmanned aerial vehicles, applied in the direction of vehicle position/route/height control, non-electric variable control, instruments, etc., can solve the problem of unstable training process, and achieve the problem of unstable training, applicability and reliability Scalable Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with specific embodiments.
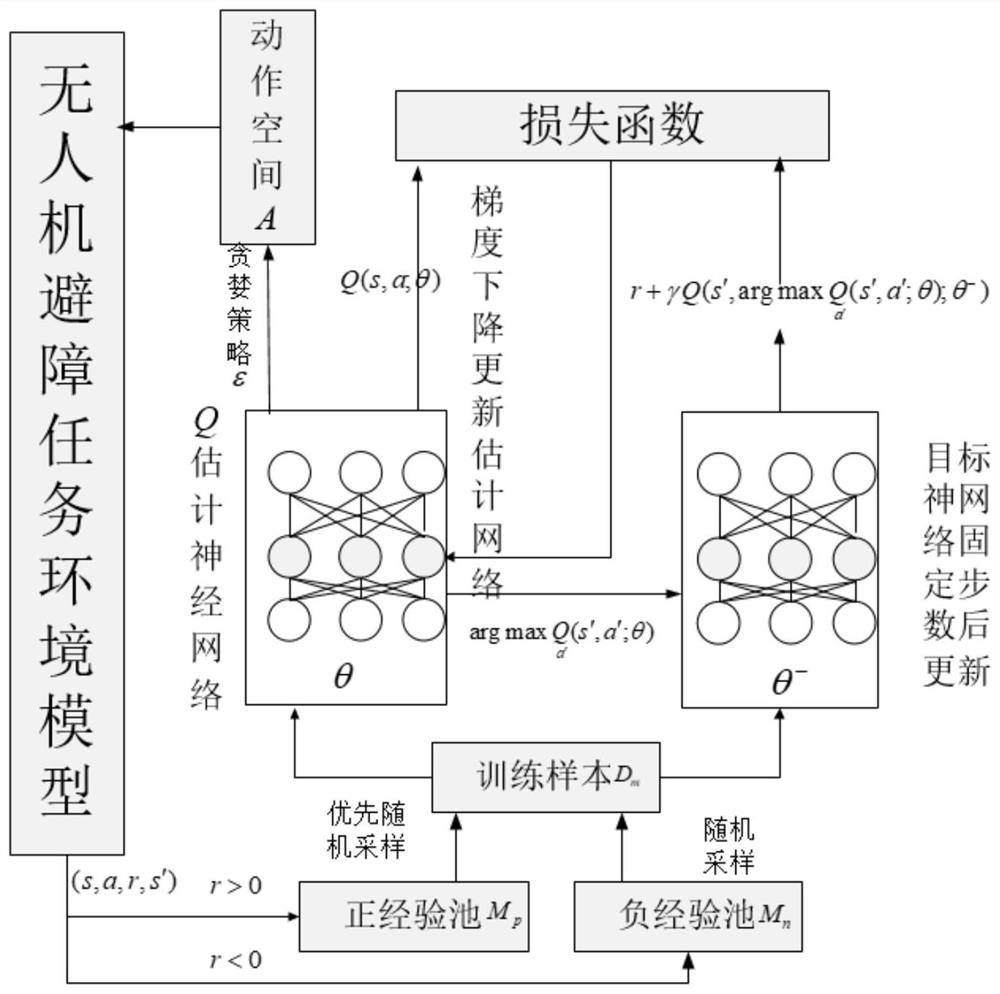
[0029] A UAV obstacle avoidance method based on deep reinforcement learning of the present invention, the method flow chart is as follows figure 1 As shown, the UAV is flying in an environment containing unknown obstacles. After the action is selected according to the greedy strategy, a new state will be generated after the execution of the action interacts with the environment and the reward generated by the state change will be calculated. The algorithm will execute the action of the UAV The previous state, the action taken, the reward obtained, and the state after executing the action are stored in positive and negative experience pools according to the size of the reward value. The algorithm draws samples from the two experience pools to form train...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More