Three-dimensional reconstruction device and method based on multi-view structure
A technology of 3D reconstruction and depth camera, which is applied in the field of 3D reconstruction of indoor scenes, can solve problems such as unacceptable depth quality, narrow field of vision, and difficulty in controlling the speed of movement, etc., to achieve accurate indoor scene reconstruction effects, accurate reconstruction results, and high quality The effect of reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The purpose and effect of the present invention will become more obvious by referring to the accompanying drawings to describe the present invention in detail.
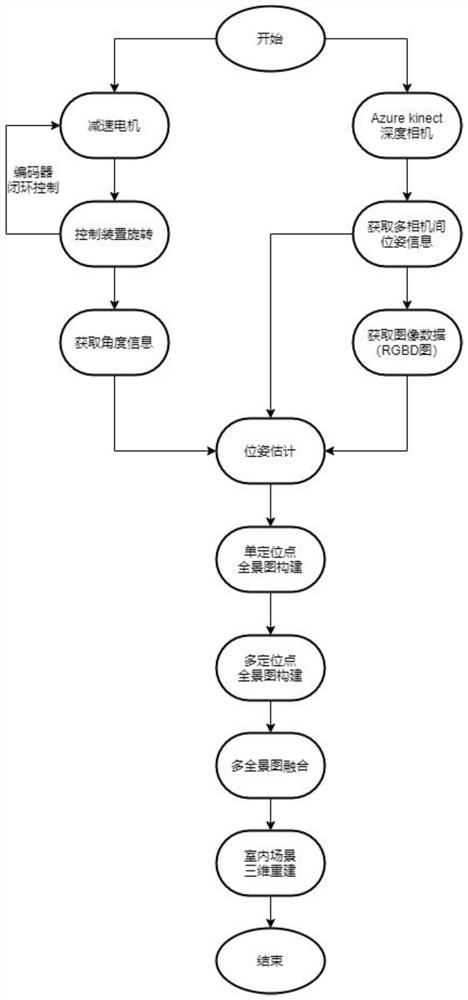
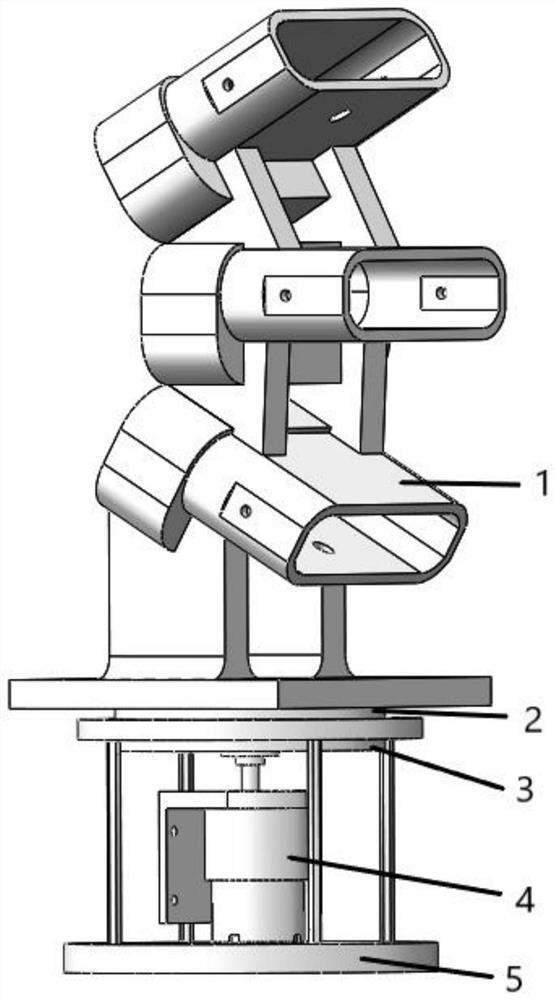
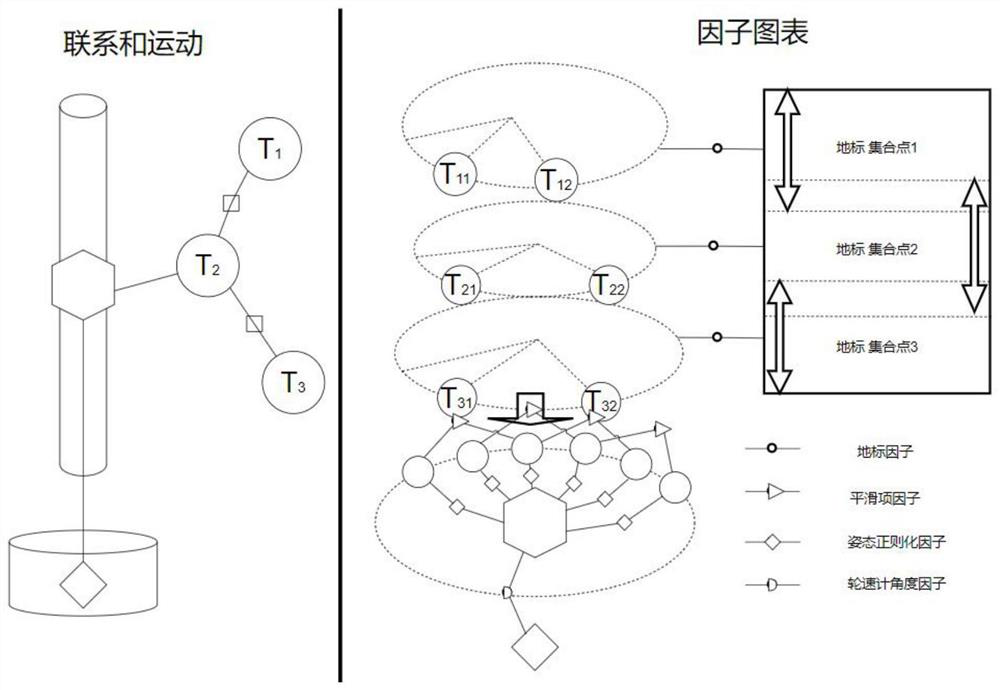
[0046] In order to realize the combination of constructing 3D panoramas and 3D reconstruction of large indoor scenes, the present invention solves the problem of panorama scanning and pose estimation between multiple cameras for subsequent reconstruction of indoor 3D scenes or generation of panoramas, and is hereby invented A panoramic scanning device based on multiple cameras is proposed to obtain more stable and accurate input data by fixing the positions of the cameras and controlling the scanning speed at a constant speed. The present invention proposes a tightly coupled framework by fusing information from multiple sensors (three depth cameras and a geared motor) using factor graph optimization to achieve high-precision and robust state estimation and reconstruction. In summary, the present invention provi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



