

Aerial multi-agent distributed phase regulation and target tracking method under guidance of multiple closed paths
A multi-agent, closed-path technology, applied in three-dimensional position/channel control, vehicle position/route/altitude control, non-electric variable control, etc., to improve timeliness and eliminate excessive dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the drawings and specific embodiments of the description.
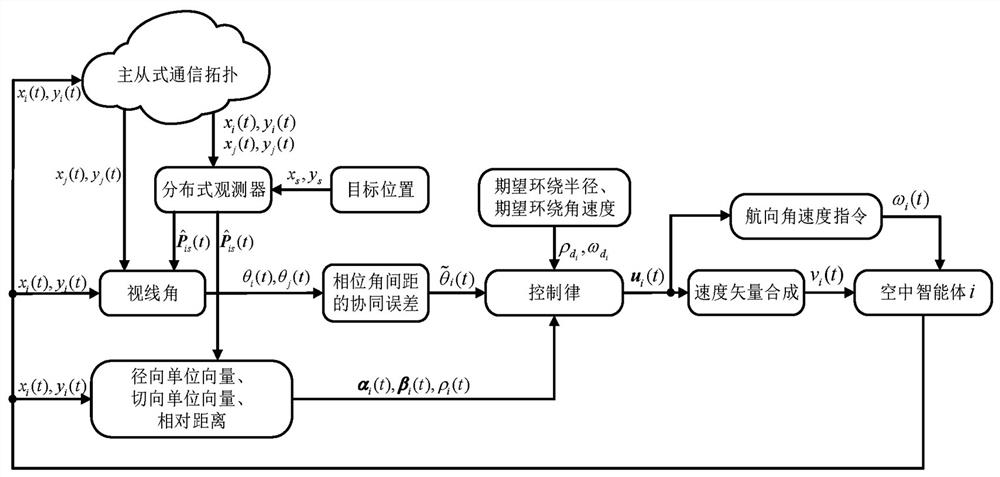
[0032] A multi-agent distributed phase control and target tracking method in the air under the guidance of multiple closed paths, such as figure 1 shown, including the following steps:
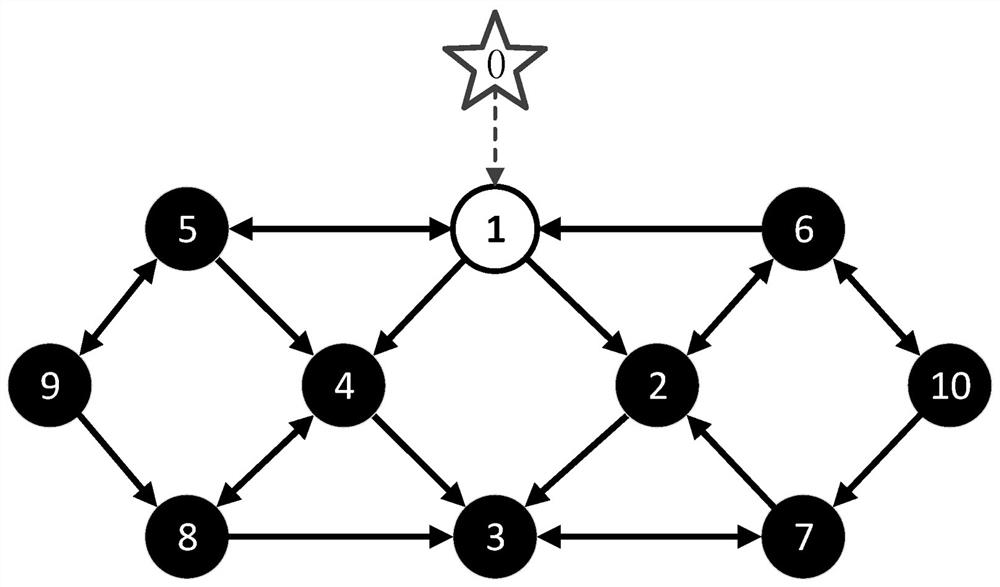
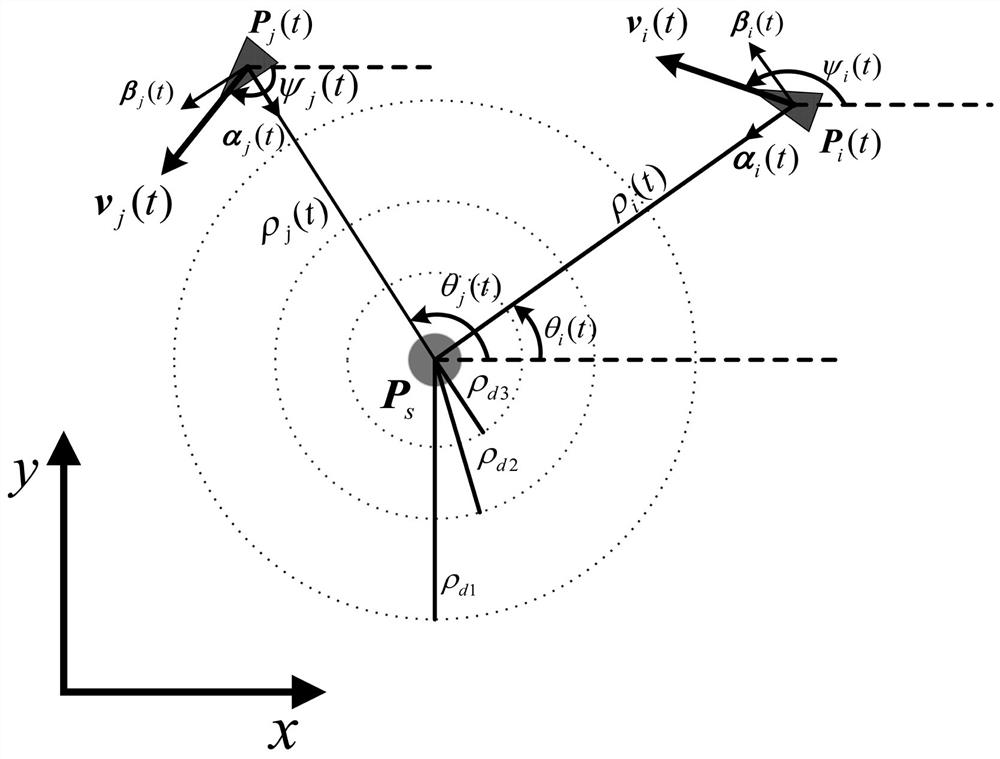
[0033] a) For the efficient and rapid detection and monitoring of regional / stationary targets in large-scale space scenarios, determine the number of air agents, the expected radius of the multi-circle orbit, the expected orbital phase angle spacing, the expected orbital angular velocity, and master-slave communication topological relationship. Specifically: determine the number of agents in the air N, the expected radius of the multi-circle orbit ρ di , desired orbital phase angle spacing desired angular velocity The directed graph adjacency matrix A=[a ij ] N×N and B=diag{b i}; where a ij is the communication weight coefficient between air age...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More