

Multi-agent distributed hunting method for escaper with uncertain position
A multi-agent, escaper technology, applied in complex mathematical operations, special data processing applications, data processing applications, etc., can solve problems such as the situation that only the position of escapees can be obtained in real time, and achieve the effect of avoiding collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
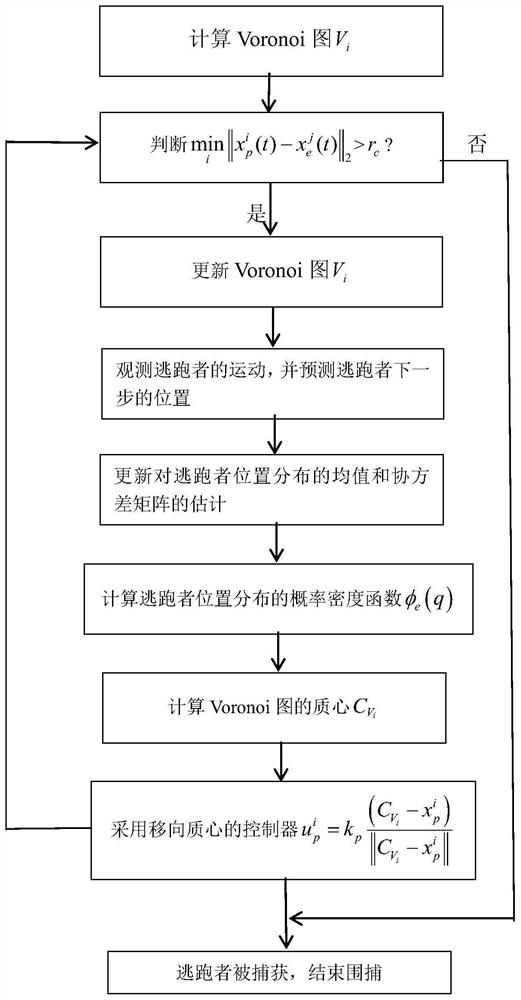
[0077] The invention proposes a multi-agent distributed round-up method with uncertain positions of escapees, which is mainly composed of a simulation part and an algorithm part.
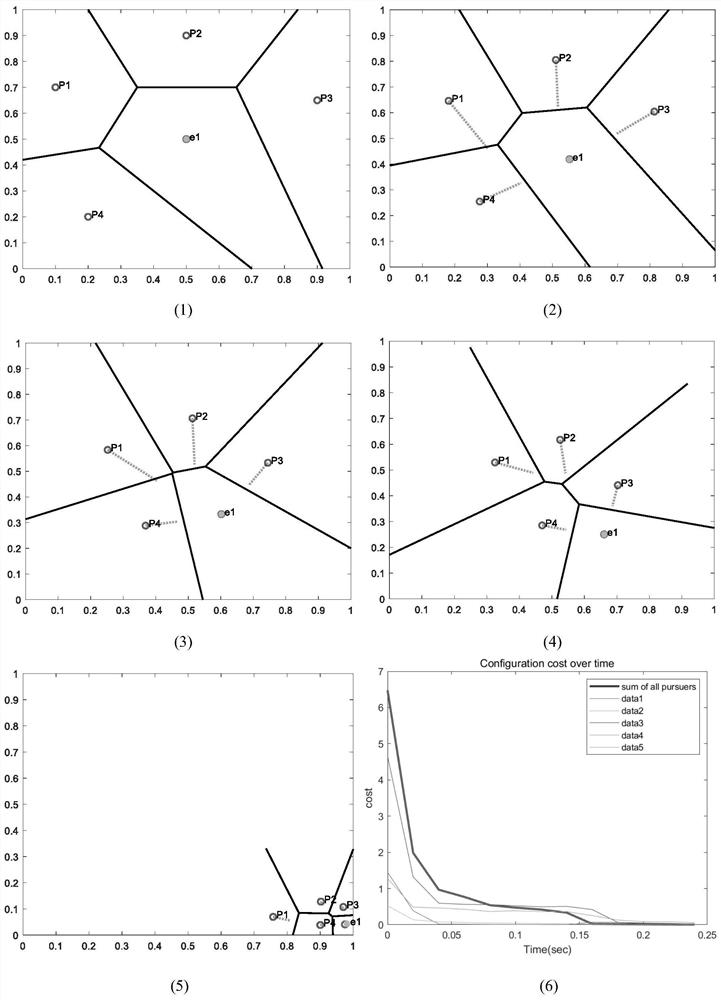
[0078] Based on MATLAB2019 software, the simulation part is designed to be in a bounded environment n p hunters to round up n e escapers, where they are all in a bounded area, and the initial position is randomly assigned, where the capture radius is set to r c =0.03m, and the maximum speed of each robot is the same, that is, set k p = 0.005. Furthermore, in order to verify the performance of the proposed round-up strategy, the escaper's strategy also needs to be designed. By comparing with other strategies, the escaper adopts the control strategy of "moving to the center of mass" in the present invention. The control strategy is:
[0079]
[0080] Among them, V e is the Voronoi partition of the fugitive, is the centroid point of the partition.
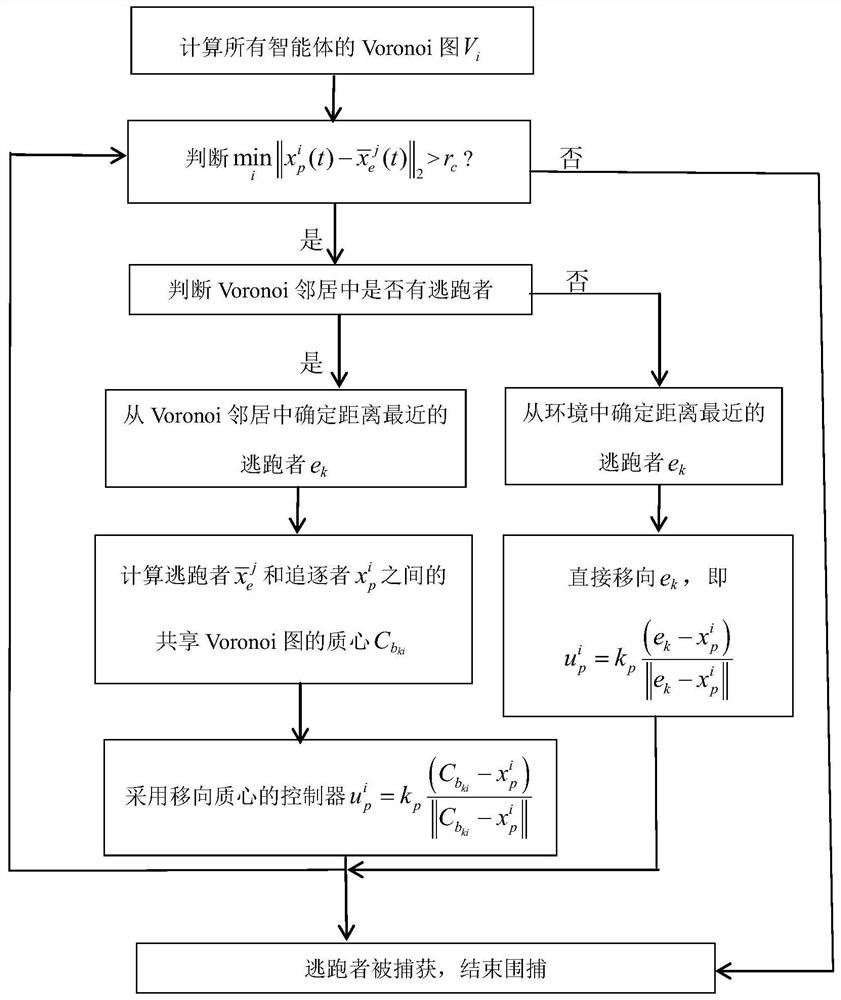
[0081] The algorithm part is mainly compo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More