

Pedestrian intention multi-task identification and trajectory prediction method under view angle of intelligent automobile
A technology for intelligent car and trajectory prediction, applied in prediction, neural learning method, biometric recognition and other directions, can solve problems such as poor generalization performance, and achieve the effect of reducing traffic accidents, increasing reasoning speed, and reducing the amount of memory occupied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with accompanying drawing.
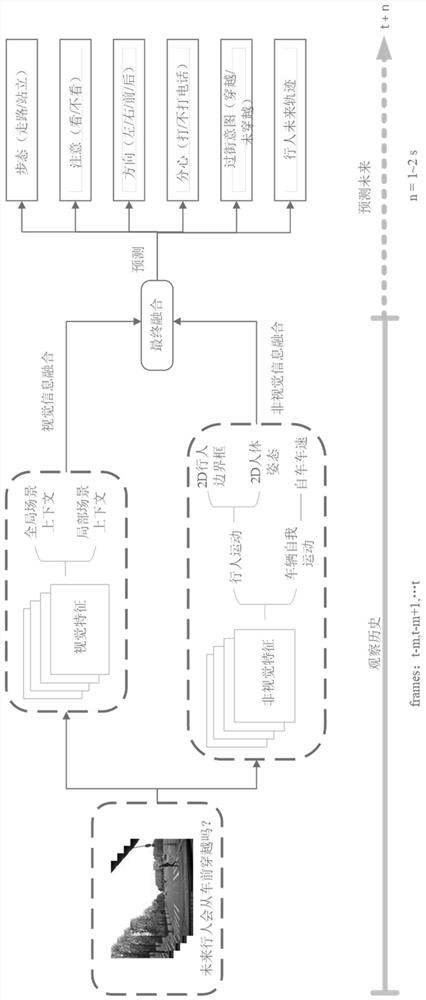
[0021] The present invention proposes a pedestrian crossing intention and trajectory prediction method from a multi-task perspective, the implementation process of which is shown in the attached figure 1 As shown, it specifically includes the following steps:
[0022] Step 1: Acquisition of input information
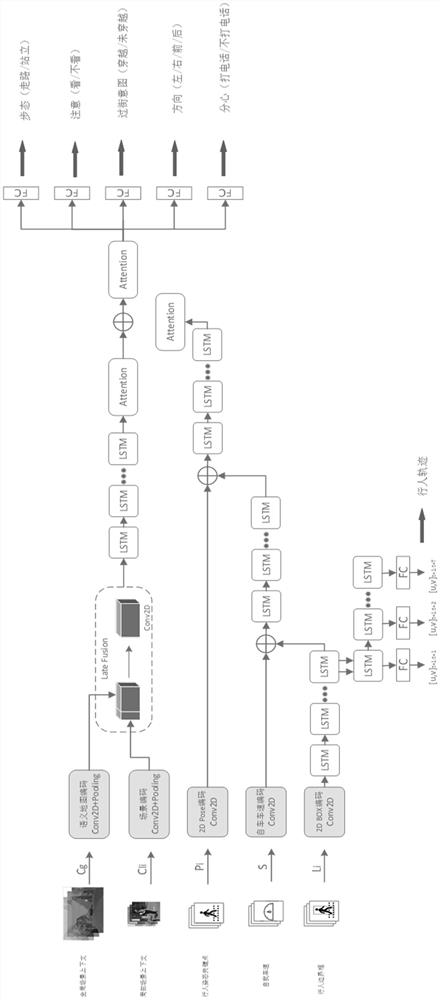
[0023] as attached figure 2 As shown, the input information used in the present invention includes global scene context information C g , the local scene context information C of the target pedestrian li , the key point information Pi of the target pedestrian, the self-speed information S of the vehicle and the 2D bounding box position trajectory L of the pedestrian i .
[0024] global context information C g ={c t-m ,c t-m+1 ,...,c t} can provide visual features that explain multiple interactions between the road and road users or between road users, c t-m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More