

Powder spraying robot for workpiece surface treatment
A workpiece surface and robot technology, applied in the field of robots, can solve the problems of affecting processing efficiency, affecting processing efficiency, and lack of a reference point, etc., to achieve precise powder spraying effect, improve aesthetics, and reduce the effect of moving inconvenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
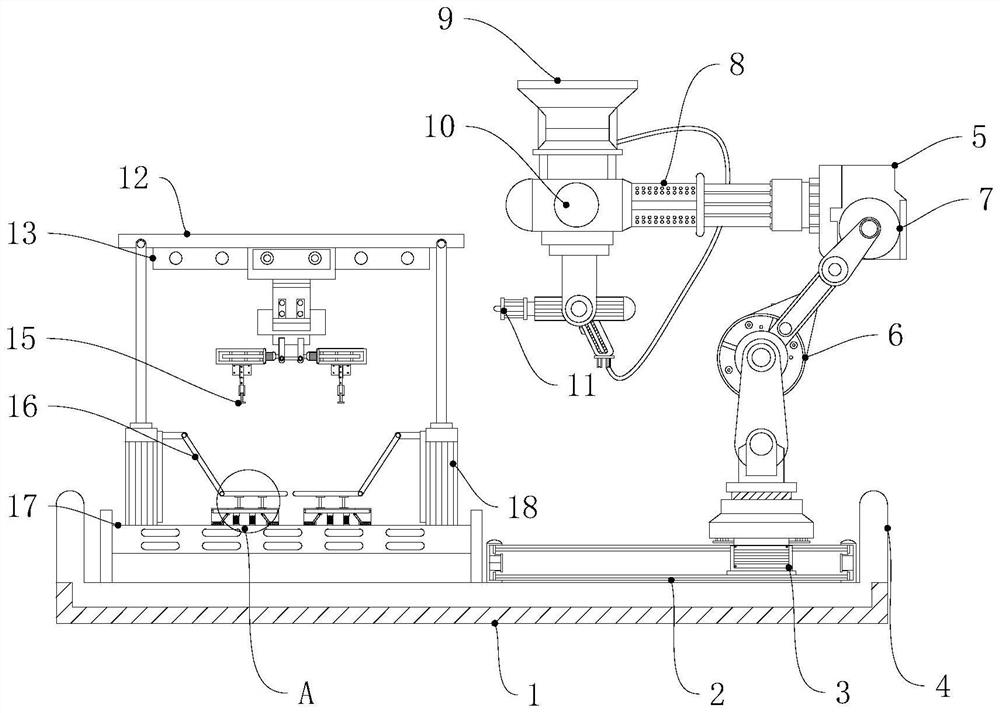
[0027] Example: such as figure 1 As shown, a powder spraying robot for workpiece surface treatment according to the present invention includes a base 1 and a robot body 5. Limiting blocks 4 are arranged on both sides of the top of the base 1, and guide rails 2 and 4 are respectively arranged between the two limiting blocks 4. The clamping mechanism 15, the middle part of the guide rail 2 is provided with a movable block 3, the top of the movable block 3 is fixedly connected with the robot body 5, the robot body 5 includes the first joint 6 and the transmission mechanism for driving the first joint 6, the first joint 6 The bottom of the frame is the machine base, and the top of the first joint 6 is connected to the second joint 7 through the transmission mechanism. The middle part of the second joint 7 is connected to a horizontal arm 8 through the transmission mechanism, and one end of the cross arm 8 is vertically connected through the transmission mechanism. To connect the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More