

Inverse kinematics general solving method and device for multi-degree-of-freedom mechanical arm
A technology of inverse kinematics and manipulators, which is applied in the general solution field of inverse kinematics of multi-degree-of-freedom manipulators, can solve problems such as the complexity and versatility of inverse solution methods, and achieve systematic calculation of manipulator kinematics with a small amount of calculation , high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] Now in conjunction with embodiment, accompanying drawing, the present invention is further described:
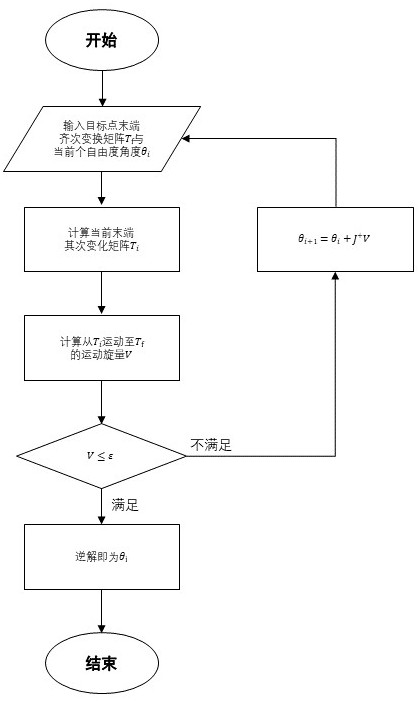
[0074] figure 1 It shows the flow chart of the general solution method of the inverse kinematics of the computational manipulator of the present invention. Such as figure 1 As shown, the solution method includes the following steps:
[0075] 1) Calculate the current angle of freedom of each joint of the robotic arm As the initial iteration angle, calculate the terminal homogeneous transformation matrix in the current state of the manipulator and move to the target position motion screw ;2) Judging the motion screw Is it less than or equal to the error , if yes, the joint degree of freedom angle at this time is the inverse kinematics solution of the manipulator, and the calculation is terminated; if no, go to step 3);
[0076] 3) Calculate the next iteration degree of freedom angle of each joint of the manipulator , the new angles of each degree of fre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More