High-rise curtain wall cleaning robot
A technology for cleaning robots and cleaning mechanisms, applied in cleaning equipment, window cleaning, building maintenance, etc., can solve the problems that cleaning robots are not easy to overcome obstacles, secondary pollution of cleaning surfaces, and difficult to adapt to curtain walls, etc., to improve cleaning efficiency and cleaning. The effect of high speed, high cleaning efficiency and not easy secondary pollution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
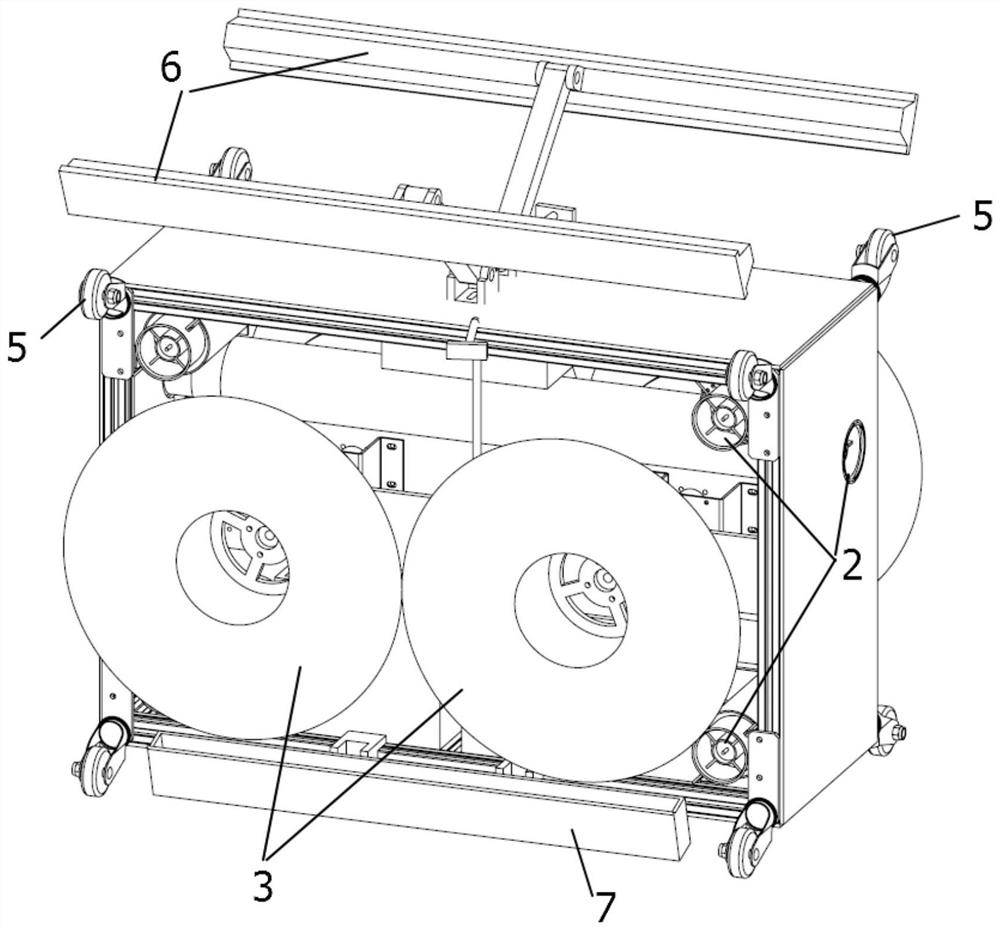
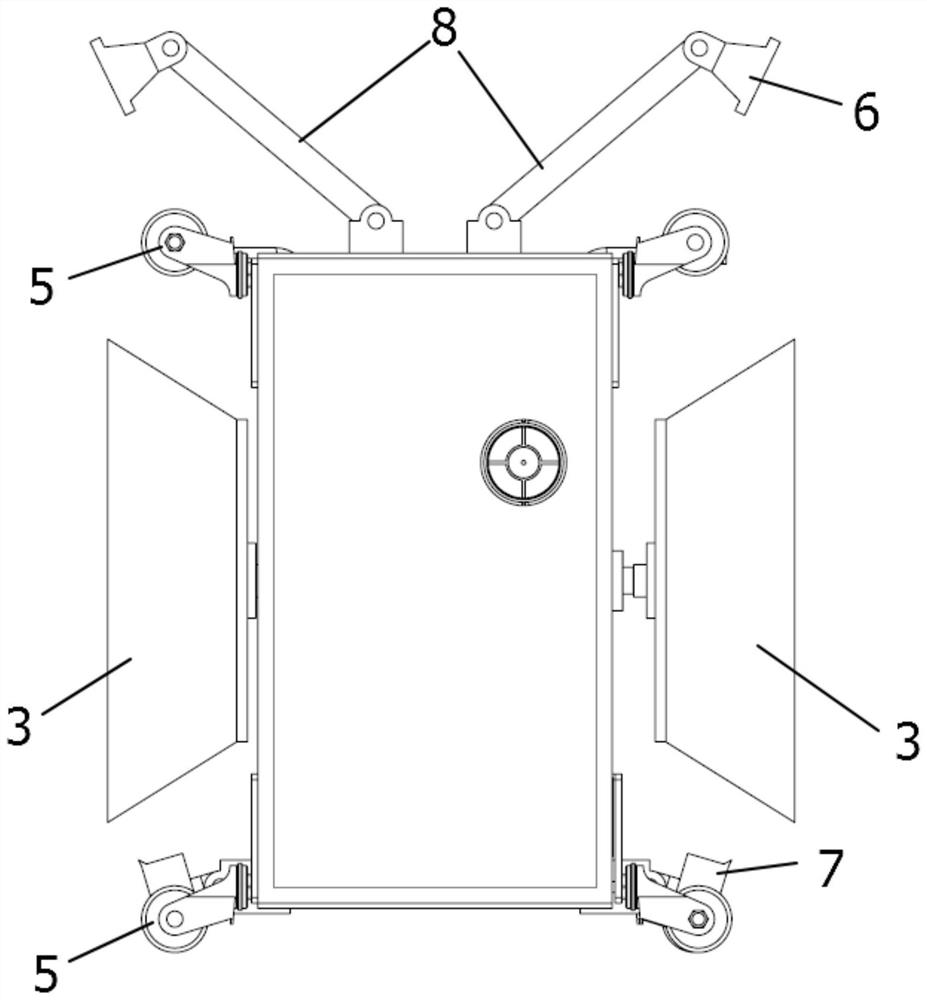
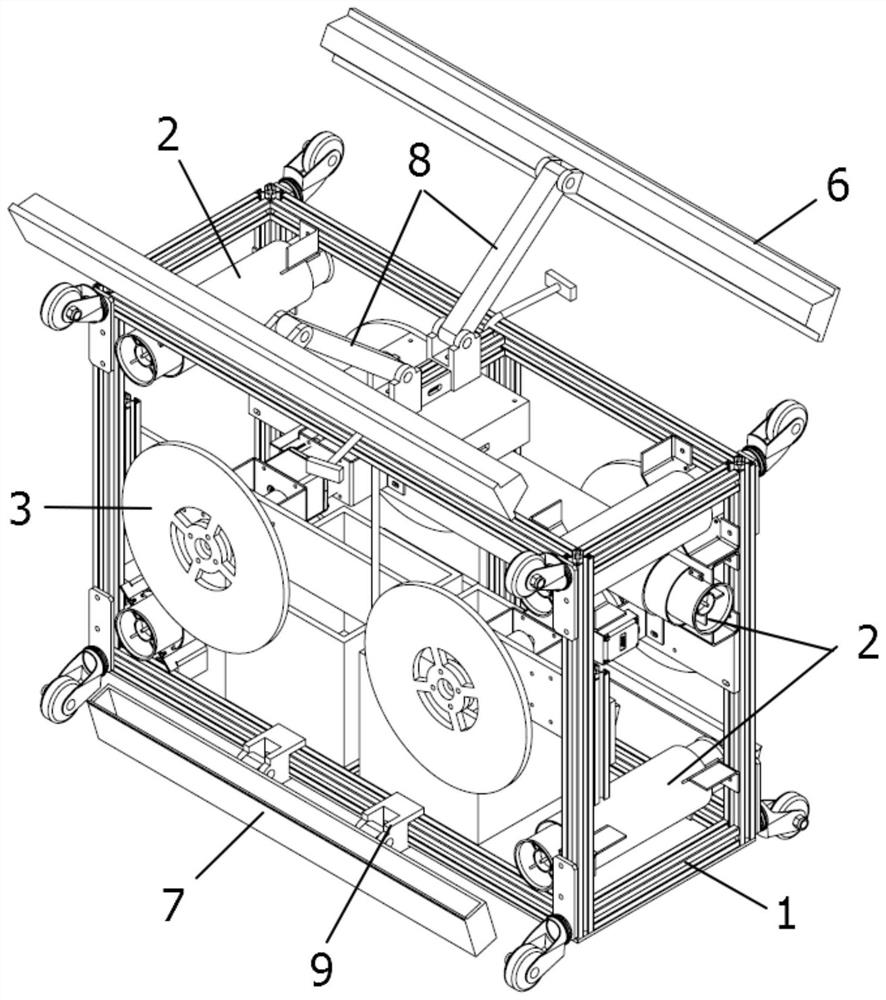
[0030] Such as Figure 1-5 As shown, the present invention provides a high-rise curtain wall cleaning robot, including a control system, and a cable retractable unit connected to the control system, a robot body, and an acquisition unit. The cable retractable unit is used to suspend the robot body, and the acquisition unit is arranged on On the robot body, it is used to collect the posture information of the robot body and the environment information around the robot body. The robot body includes a frame 1, and a plurality of sets of wind mechanisms 2 are arranged around the frame 1, which are parallel to the two opposite sides of the curtain wall One or more cleaning mechanisms 3 are arranged on each of them, and multiple sets of wind mechanisms 2 are arranged in a space cross, which are respectively us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com