

Bus driving control method and system based on cooperative adaptive cruise control
A technology of adaptive cruise and control method, applied in traffic control systems, traffic control systems of road vehicles, instruments, etc. Balance and other issues to achieve the effect of improving road traffic capacity, saving fuel consumption and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] This embodiment provides a bus driving control method based on cooperative adaptive cruise control, including:
[0043] Judging whether the bus vehicle is in the cooperative adaptive cruise control fleet;
[0044] If the bus is in the fleet, determine the driving mode according to the position of the bus in the fleet; if the bus is not in the fleet, judge the time interval between the bus and its adjacent bus in front, if the time interval is greater than the preset value, the bus The vehicle cruises in the adaptive cruise control mode; when the time interval is less than the preset value, the bus switches to the cooperative adaptive cruise control mode;
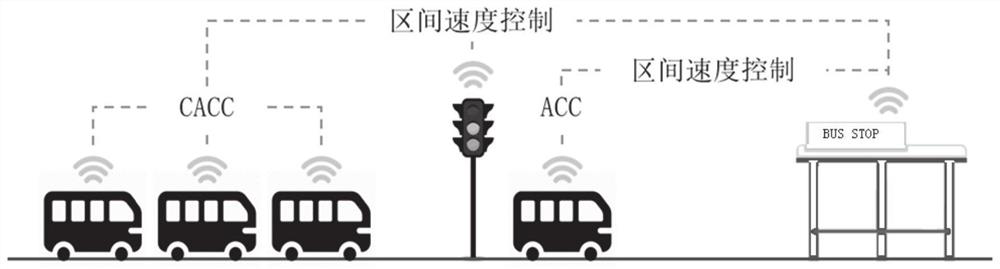
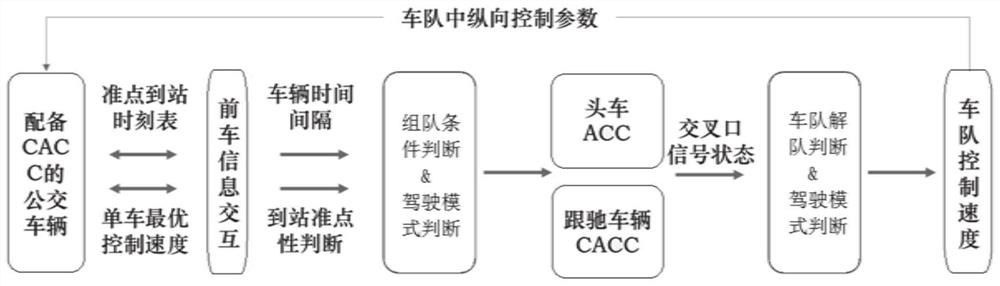
[0045] Such as figure 1 and figure 2 As shown, the overall idea in this embodiment is that, at the line level, the public transport control system based on CACC dynamically optimizes the expected speed of each bus vehicle to ensure its service level; at the section level, the public transport control system based o...
Embodiment 2
[0081] This embodiment provides a bus driving control system based on cooperative adaptive cruise control, including a judgment module and a control module;
[0082] The judging module is configured to: judge whether the bus vehicle is in the cooperative adaptive cruise control fleet;
[0083] The control module is configured to: if the bus vehicle is in the fleet, determine the driving mode according to the position of the bus vehicle in the fleet; if the bus vehicle is not in the fleet, judge the time interval between the bus vehicle and its adjacent bus vehicle in front, if If the time interval is greater than the preset value, the bus cruises in the adaptive cruise control mode; when the time interval is smaller than the preset value, the bus switches to the cooperative adaptive cruise control mode.
Embodiment 3
[0085] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the program is executed by a processor, the steps of the method for controlling bus driving based on cooperative adaptive cruise control described in Embodiment 1 are implemented. .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More