

Control parameter optimization method of automobile automatic steering system containing feedback time lag
A technology of automatic steering system and control parameters, which is applied in the direction of electric controllers and controllers with specific characteristics, etc., can solve the problems of lack of versatility, inability to adapt to changes in system parameters or system time lag, and high cost, and achieve improvement Controller performance, the effect of achieving expected design performance, and good application value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0076] Embodiment: the controller parameter optimization of the automatic steering system of a certain type of car, the steps are:
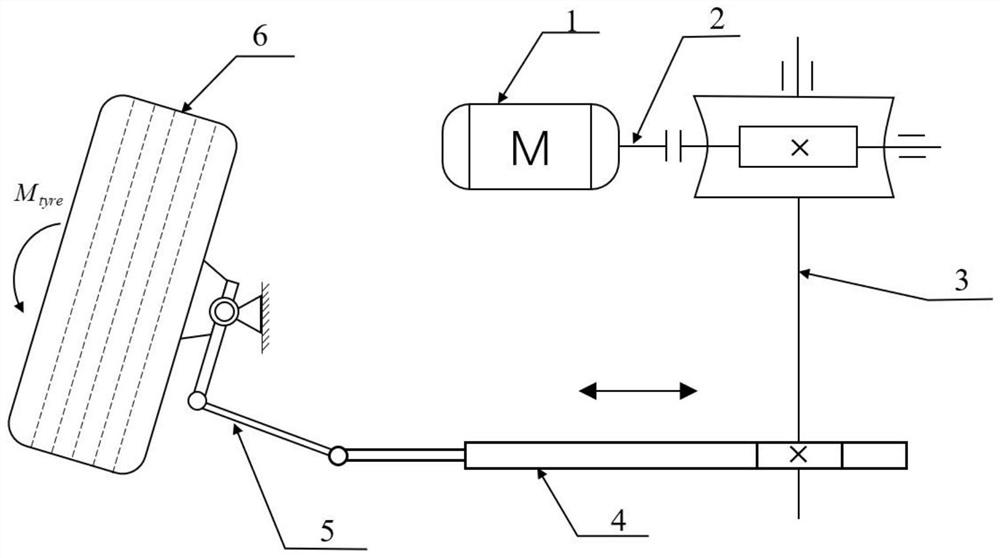
[0077] Step a, set up the kinetic model in (1), wherein I m =2[kg·m 2 ]; I s =8[kg·m 2 ];C s =960[Ns / rad]; δ d = 0.1 [rad]; T d =6[N·m];K i = 51800 [N / rad]; i m = 10.2; τ = 0.2 [s];
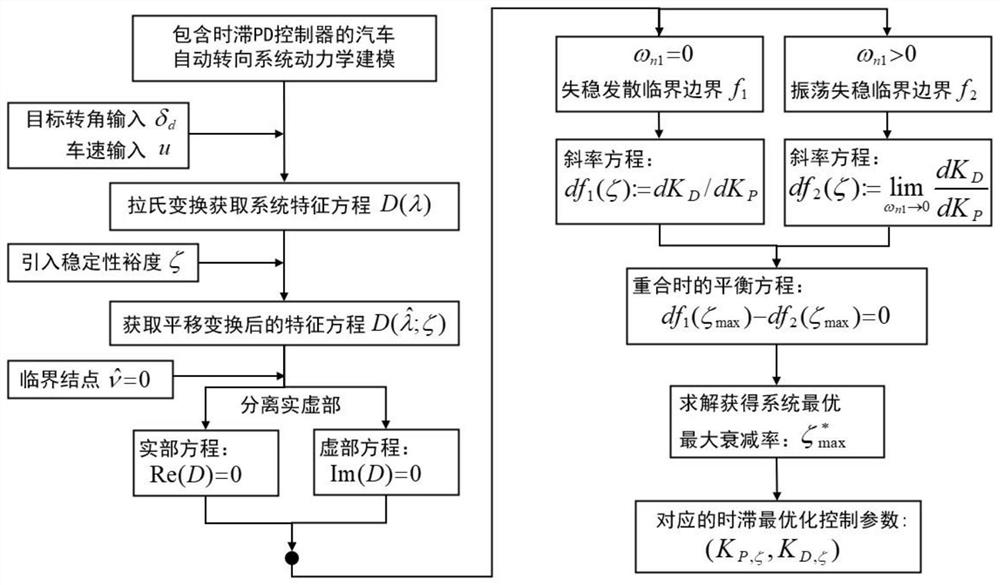
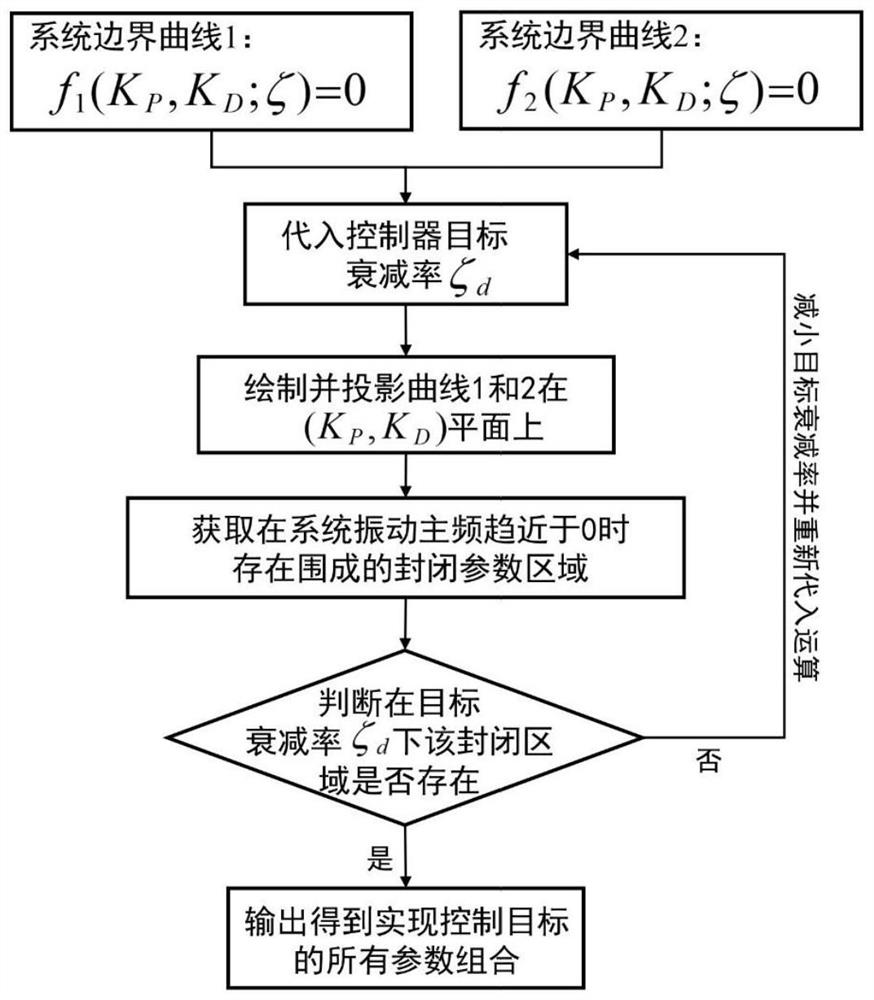
[0078] Step b. Execute the control parameter optimization method of the automobile automatic steering system including feedback time lag, and select the target decay rate ζ of the steering controller of the car d for 1 and 3, in (K P , K D ) plane draws the critical boundary f when the instability diverges 1 and the critical boundary f for oscillation instability 2 , can be obtained as Figure 4 and Figure 5 The closed area shown, that is, all control parameters in this area (K P , K D ) combinations all meet the expected target requirements of the steering controller.
[0079] Step c. Substituting the parameters into formula (11) and further solvi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More