Automatic limited slip differential of planetary gear train
A technology of limited slip differential and planetary gear train, applied in differential transmission, transmission, belt/chain/gear, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
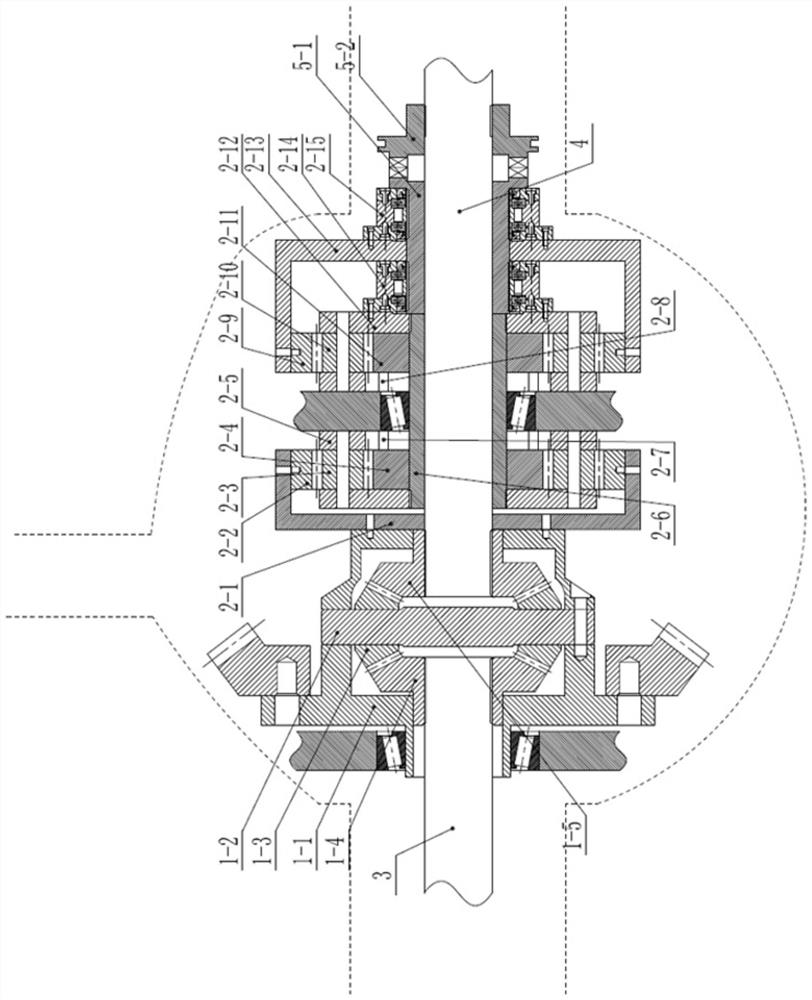
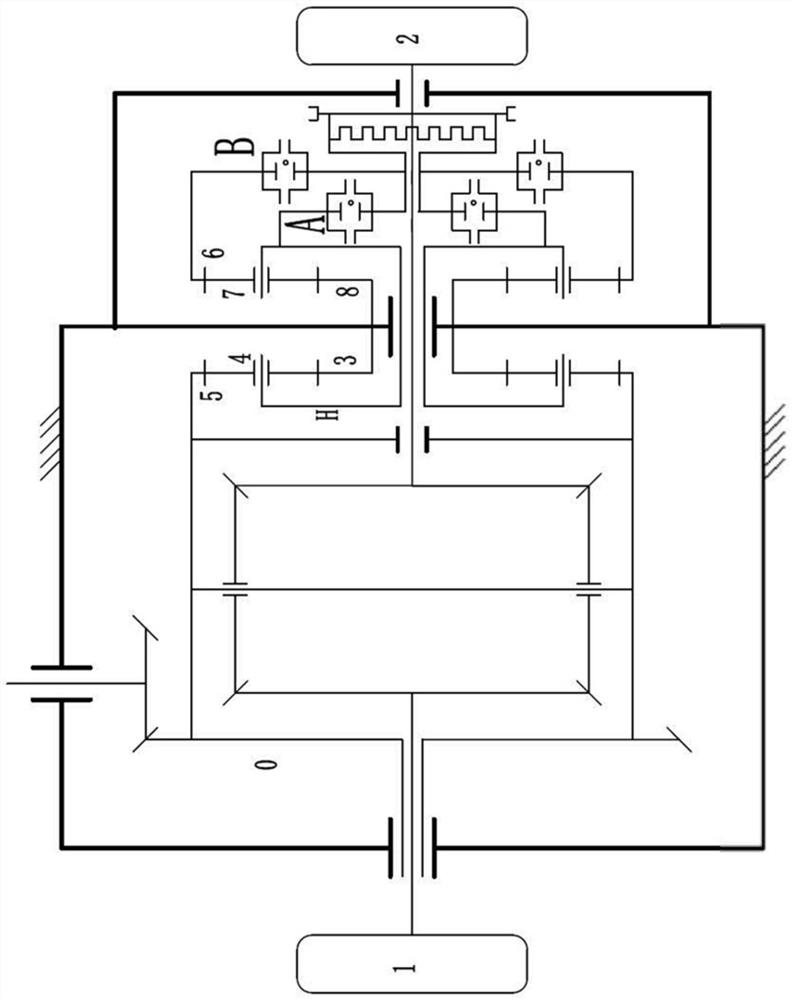
[0052] to combine Figure 1-Figure 37 As shown, among them, Figure 4 to Figure 10 It is a reference drawing of the main parts entity model involved in the present invention. A planetary gear train automatic limited-slip differential of the present invention is composed of a main differential 1, a planetary gear train differential controller 2, a left drive axle shaft 3, The right drive shaft 4 and the clutch 5 are composed of five parts, which are suitable for all wheeled vehicles of various sizes equipped with differentials;
[0053] The principle of the main differential 1 is the same as that of the symmetrical bevel gear differential in the prior art, but it is different in structure. Shaft 1-2, planetary gear 1-3, left side shaft gear 1-4, right side shaft gear 1-5 and other parts. The differential housing 1-1 and the pin shaft 1-2 are connected ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More