

Learning-based method for controlling unmanned aerial vehicle to complete trajectory tracking under wind disturbance
A trajectory tracking and unmanned aerial vehicle technology, applied in three-dimensional position/channel control, mechanical equipment, combustion engine, etc., can solve problems such as inability to achieve results, poor trajectory tracking accuracy, etc., to maintain fidelity, ensure real-time, The effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
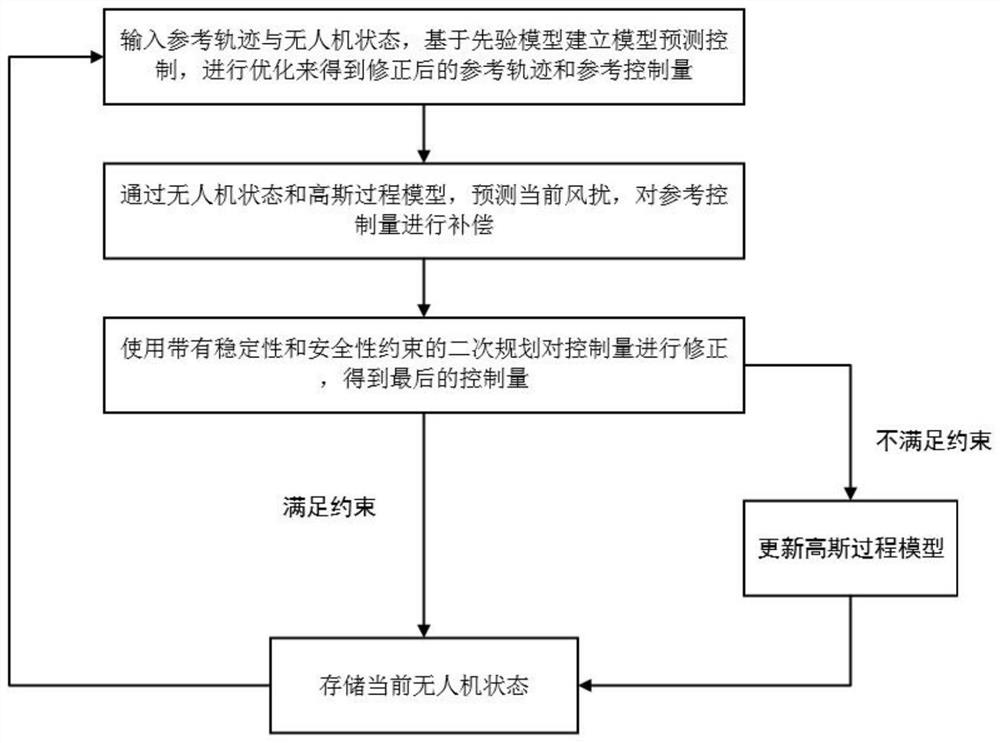
[0071] Such as figure 1 As shown, a learning-based method for controlling UAV trajectory tracking under wind disturbance includes the following steps:
[0072] Step 1. Input the reference trajectory and UAV state, establish model predictive control based on the prior model, and optimize to obtain the corrected reference trajectory and reference control quantity.
[0073] Input the reference trajectory x, d, input the current state x of the drone; consider a nonlinear affine model
[0074] Transform the UAV system into this form; and linearize it to obtain a linear model, based on which model predictive control is established, that is, at each sampling time t k = t 0 +k×d t , t 0 is the current time, k is the number of prediction steps, and dt is the control interval, to solve a finite time-domain optimal control problem, as follows:
[0075]
[0076]
[0077]
[0078]
[0079]
[0080] u 1 (t)∈U
[0081] in To predict the state, the objective function...
Embodiment 2
[0129] This embodiment provides an electronic device, including: a memory, a processor, and a computer program stored on the memory and capable of running on the processor, and the processor executes the computer program to realize the learning-based learning described in Embodiment 1. The method of controlling UAV to complete trajectory tracking under wind disturbance.
Embodiment 3
[0131] This embodiment provides a computer-readable storage medium, on which a computer program is stored. When the computer program is executed by a processor, the learning-based control UAV described in Embodiment 1 is implemented to complete the trajectory under wind disturbance. method of tracking.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More