

Robot standard interaction tool development system
A technology for developing systems and robots, applied in the field of robotics, can solve problems such as poor economics of robots and their terminal devices, inability to adapt to the needs of families or individuals, and insufficient adaptability of robot adaptation devices to cope with the expansion of scene development. The effect of cleaning cleanliness and cleaning efficiency, strong self-adaptability, and easy connection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0058] It should be understood that terms such as "having", "comprising" and "including" used herein do not exclude the presence or addition of one or more other elements or combinations thereof.
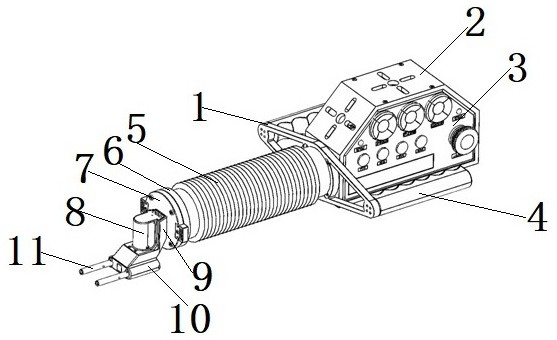
[0059] Such as figure 1 As shown, the invention provides a robot standard interactive tool development system, comprising:
[0060] Application tools, which complete specified tasks in different scenarios according to the user's wishes or robot control instructions;
[0061] a quick change device, which has at least one cavity to facilitate connection to the end of the robot or a hand handle, and a positioning connecting rod 11 to facilitate quick connection or replacement of the application tool;
[0062] The robot end adapter device has at least one robot adapter component conn...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More