

Vehicle and vehicle path planning method and device
A technology of vehicle path and path, which is applied to measurement devices, road network navigators, instruments, etc., and can solve problems such as secondary planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] This embodiment is aimed at the situation that only one path is included in the planned global path.
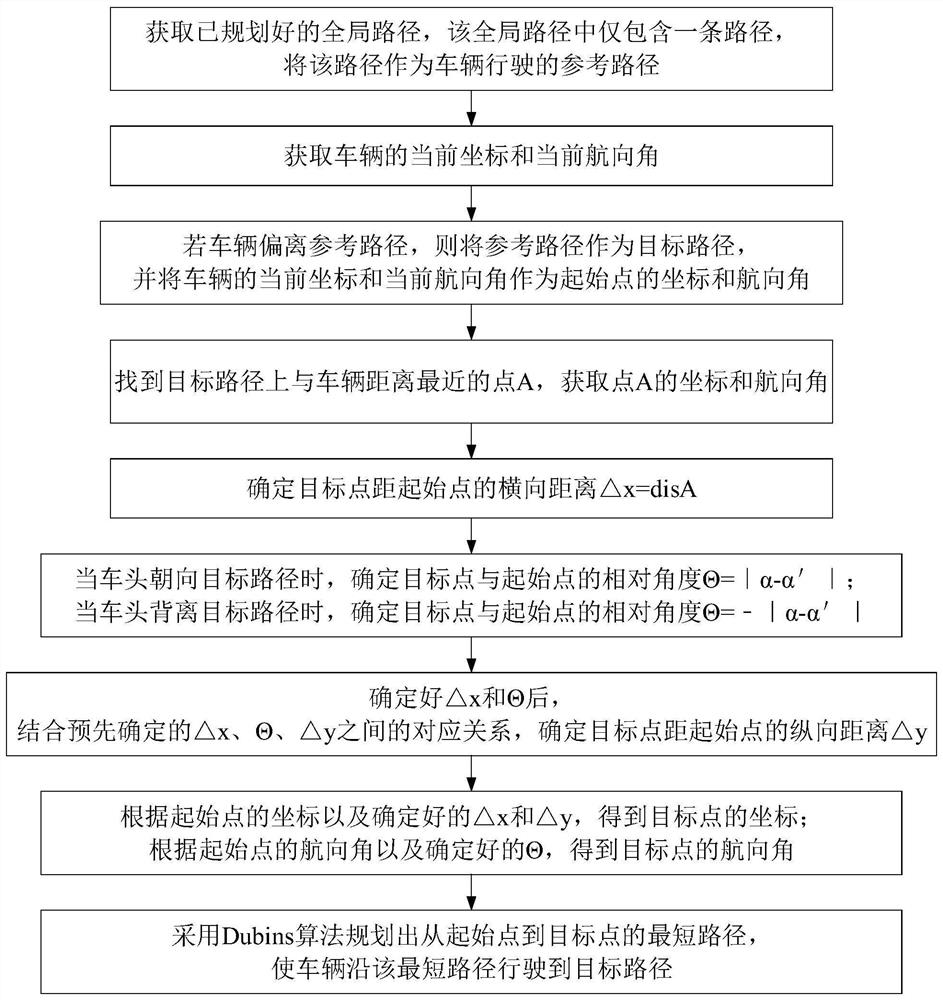
[0056] Such as figure 1 As shown, the vehicle route planning method of this embodiment includes the following steps:
[0057] (1) Obtain a planned global path, which contains only one path, and use this path as a reference path for the vehicle to travel;
[0058] Among them, the planned global path can be obtained directly by using the navigation and positioning system, or by making a high-precision map of the environment and using algorithms such as A* (A-Star algorithm) and Dijkstra (Dickstra algorithm). Yes, the coordinates, heading angle and other information of each path point on the global path are stored in the form of discrete points.
[0059] (2) Acquire the current coordinates and current heading angle of the vehicle in real time while the vehicle is traveling along the reference path, and judge whether the vehicle deviates from the reference path according...
Embodiment 2
[0092] This embodiment is aimed at the situation that the planned global path includes multiple paths.
[0093] Such as Figure 4 As shown, the vehicle route planning method of this embodiment includes the following steps:
[0094] (1) Obtain the planned global path, which contains multiple paths, select one as the reference path for the vehicle, and the remaining paths as the backup path for the vehicle;
[0095] Among them, the planned global path can be obtained directly by using the navigation and positioning system, or by making a high-precision map of the environment and using algorithms such as A* (A-Star algorithm) and Dijkstra (Dickstra algorithm). Yes, the coordinates, heading angle and other information of each path point on the global path are stored in the form of discrete points.
[0096] (2) Acquire the current coordinates and the current heading angle of the vehicle in real time while the vehicle is running along the reference path, and judge whether the vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More