Multi-radiation source direct positioning method based on single unmanned aerial vehicle
A multi-radiation source and positioning method technology, applied in the field of multi-radiation source direct positioning, can solve the problems of limited positioning accuracy and resolution ability, and achieve the effect of facilitating engineering implementation and improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
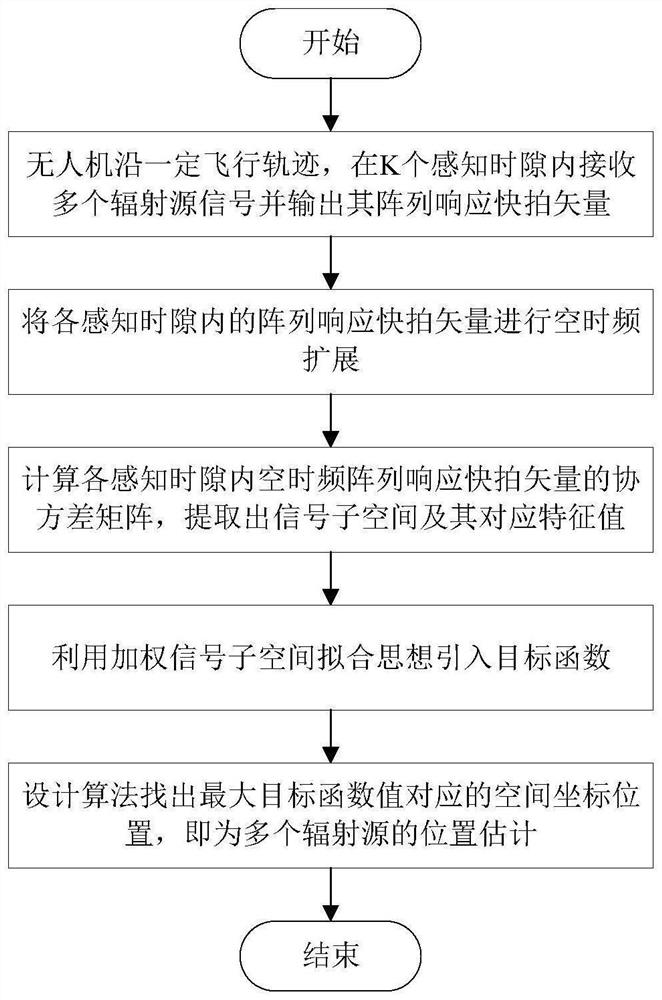
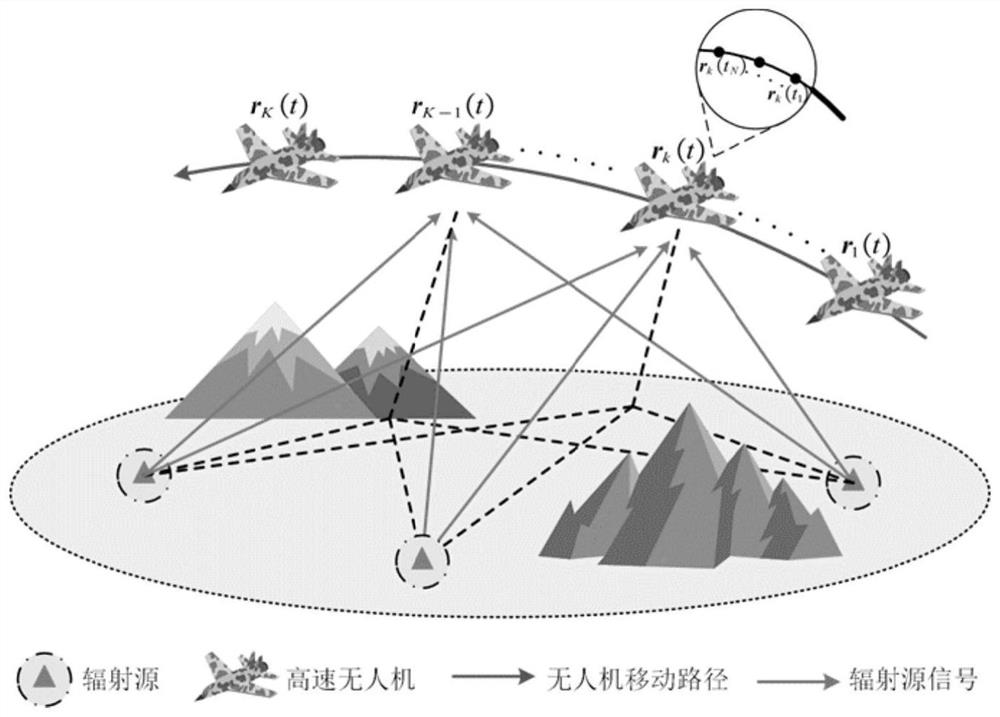
[0091] Example: Setting area S=3500×5000m 2 There is an unmanned aerial vehicle equipped with a uniform linear array of M=5 elements, and there are Q=2 radiation sources in the far-field area of the array. This drone starts from position [-1500, 3000] T (m) starting from west to east with v=[200, 0] T (m / s) moving at a uniform speed, reaching position [900, 3000] after K = 9 sensing time slots T (m). The two radiation sources are located at p 1 =[-1200, 0] T (m) and p 2 =[1000, 0] T (m), transmit center frequency f c =200(MHz), the initial phase is narrowband signal. In addition, other parameters are set as follows: c 1 =c 2 = 1.49445, w = 0.8, N g =40, N p =10, H=100, L=10, N c =1600, ε=1×e -5 , D=1000.
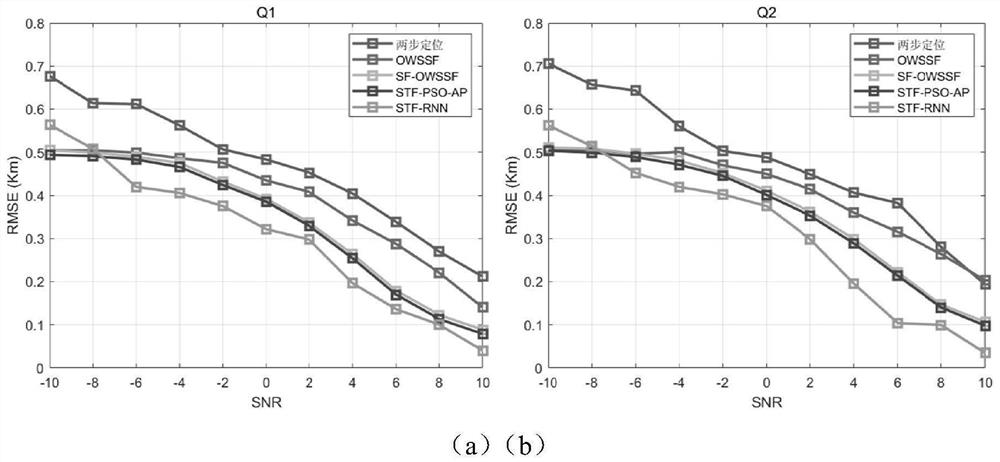
[0092] image 3 and Figure 4 are the root mean square error of positioning and the average relative error of positioning of each algorithm, respectively, which are named as two-step positioning, OWSSF, SF-OWSSF, STF-PSO-AP, and STF-RNN. Let the signal-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



