

Autonomous control method and system for visual field of endoscope and medium
An autonomous control, endoscopy technology, applied in endoscopy, medical science, surgical robotics, etc., can solve problems such as single optimization goal, lack of endoscope posture control and visual feedback quality evaluation and optimization, etc. Improved safety, reduced hand-eye incoordination, accurate and effective tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
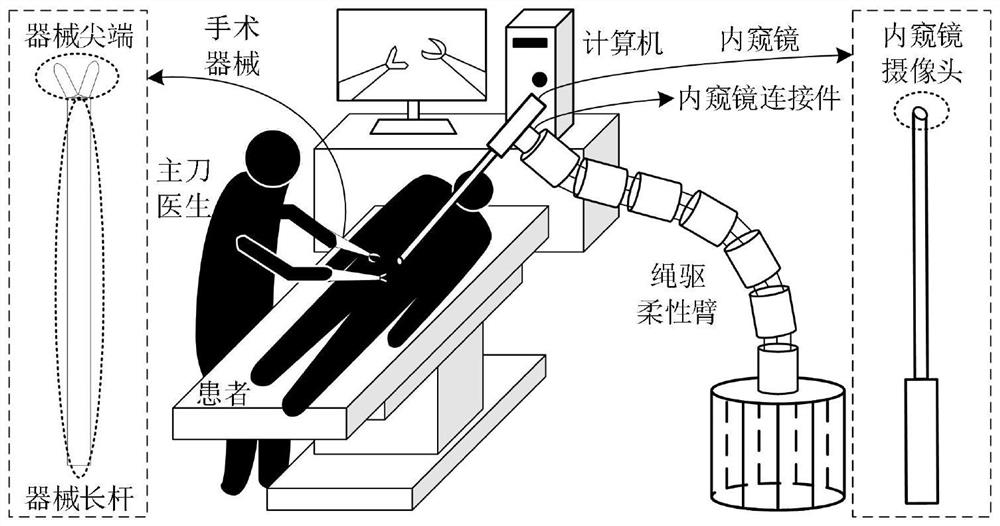
[0069] Such as figure 1 As shown, the auxiliary mirror-holding robot system is mainly composed of a computer with control software, a rope-driven flexible arm, an endoscope connector, an endoscope and a monitor. The computer is connected with the rope-driven flexible arm, the endoscope and the monitor, and is the control center of the whole auxiliary mirror-holding robot system. The endoscope connector is installed at the end of the rope-driven flexible arm for fixing the endoscope. During laparoscopic surgery, the auxiliary mirror-holding robot system adjusts the posture of the endoscopic camera through active or passive control modes to provide correct and stable visual feedback to the surgeon, and assist the surgeon to complete a series of surgical operations.
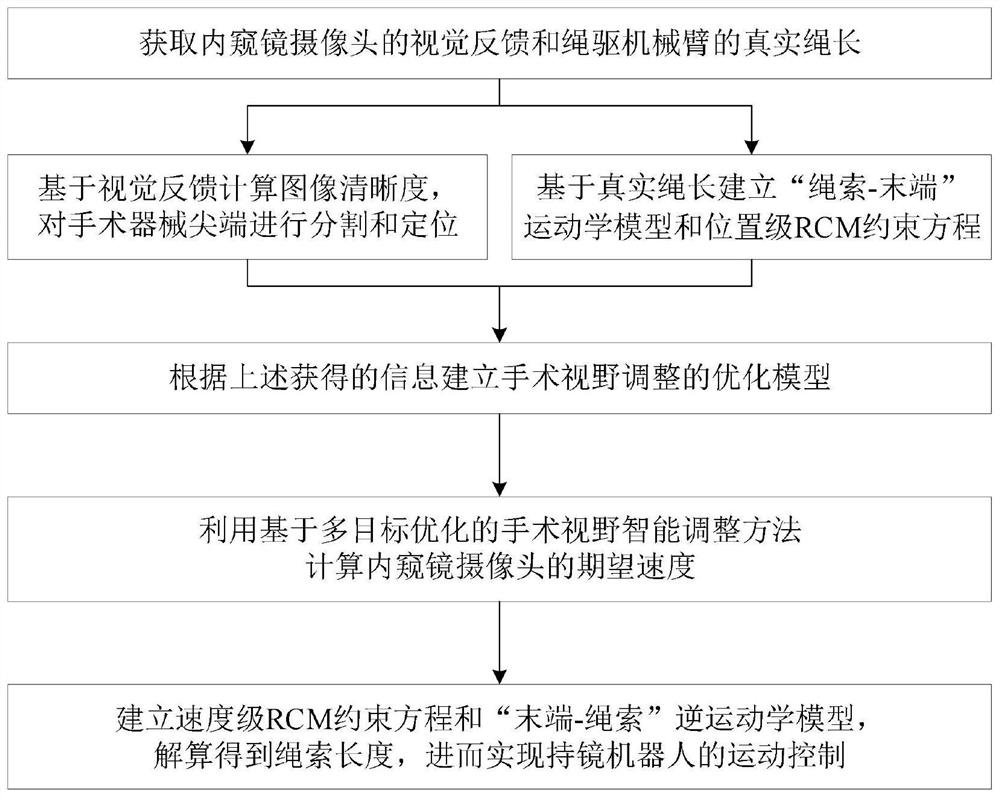
[0070] Such as figure 2 As shown, the present invention provides a method for autonomous control of endoscope field of view, including:
[0071] Obtain visual feedback from the endoscope camera and the actual ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More