

Vascular intervention surgical robot double-position driving and feedback device suitable for clinical use
A technology of interventional operation and feedback device, which is applied in the field of dual-position drive and feedback device of vascular interventional operation robot, can solve the problems of inability to popularize and use, complex structure, redundant structure, etc., and achieves reduction of radiation exposure time and contrast agent usage. , no radiation, the effect of reducing physical energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
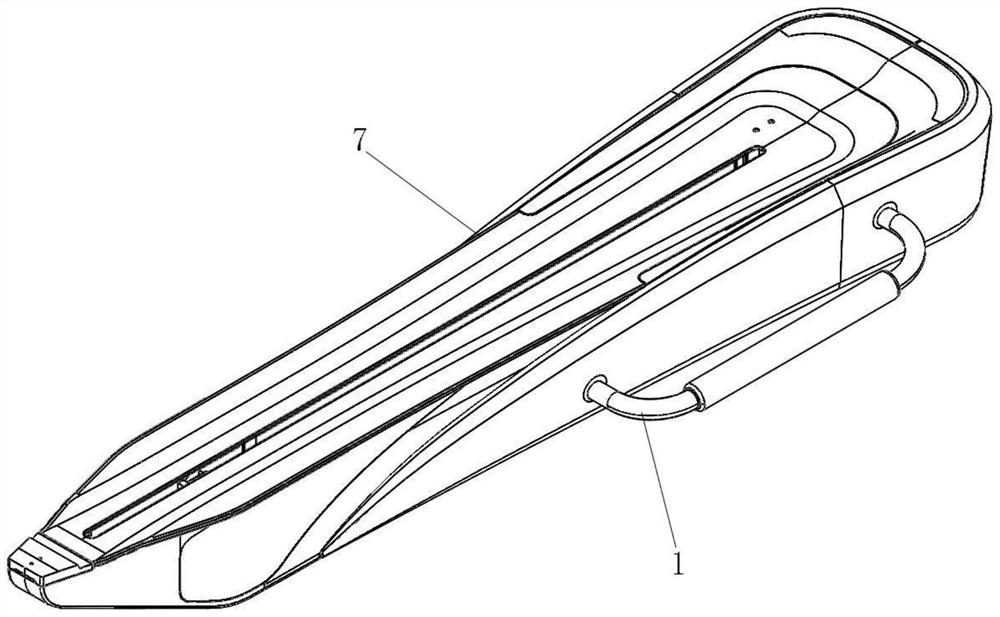
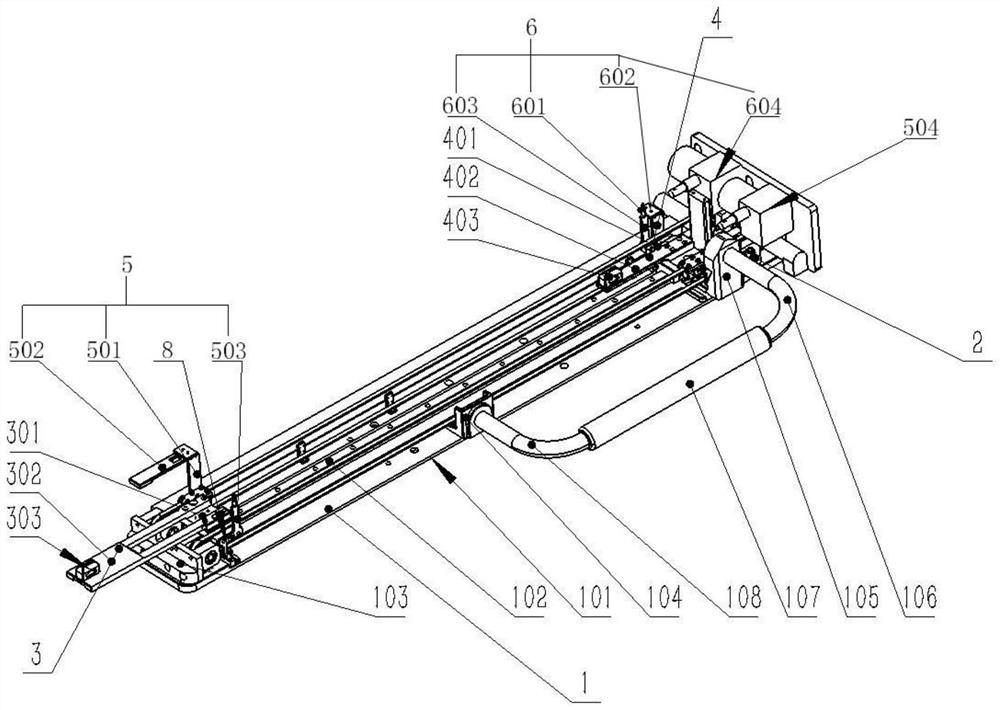
[0037] Such as figure 1 and figure 2As shown, the present invention provides a clinically applicable two-position driving and feedback device for vascular interventional surgery robot. The device includes a casing 7 and a two-position driving mechanism arranged in the casing 7 . Wherein, the two-position drive mechanism includes a bottom plate assembly 1 , a timing belt assembly 2 , a distal drive platform assembly 3 and a proximal drive platform assembly 4 . The synchronous belt assembly 2 , the distal drive platform assembly 3 and the proximal drive platform assembly 4 are all arranged on the bottom plate assembly 1 . There are two synchronous belt assemblies 2, one of which is connected to the far-end drive platform assembly 3, and is used to drive the catheter controller arranged on the far-end drive platform assembly 3 to move along the length direction of the base plate assembly 1; A synchronous belt assembly 2 is connected with the proximal driving platform assembly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More