

Local path planning method and device, robot and storage medium
A local path planning and local path technology, applied in the field of robotics, can solve the problems of poor robot operation safety and robot obstacle avoidance performance, and achieve the effect of improving space coverage, improving obstacle avoidance performance, and increasing the total number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
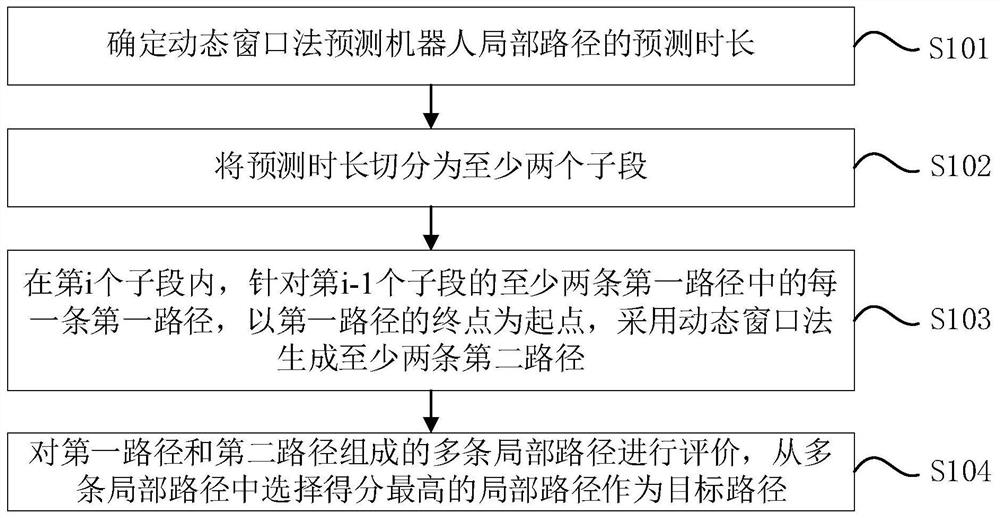
[0061] Figure 1A It is a flow chart of a local path planning method provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of robot local path planning. This method can be executed by the local path planning device provided by the embodiment of the present invention. The device can Realized by software and / or hardware, and configured in the robot provided by the embodiment of the present invention, such as Figure 1A As shown, the method specifically includes the following steps:
[0062] S101. Determine the prediction duration of the dynamic window method to predict the local path of the robot.
[0063] As mentioned above, the dynamic window method refers to sampling multiple times at a preset sampling frequency in the constrained velocity space to obtain multiple sets of sampling velocities (including linear velocity and angular velocity), and to simulate the robot at these sampling velocities within a certain period of time. (that...
Embodiment 2
[0077] figure 2 It is a flowchart of a local path planning method provided by Embodiment 2 of the present invention. This embodiment is further refined on the basis of the above-mentioned Embodiment 1, and describes in detail the specific process of each step in the local path planning method, as shown in figure 2 As shown, the method includes:
[0078] S201. Determine the prediction duration of the dynamic window method to predict the local path of the robot.
[0079] Exemplarily, as described in the foregoing embodiments, the robot may read configuration parameters during each start-up process, acquire and determine the prediction duration of the robot's local path predicted by the dynamic window method.
[0080] S202. Divide the forecast duration into at least two sub-segments.
[0081] Exemplarily, in the embodiment of the present invention, the predicted duration is divided into at least two sub-segments of equal duration by using an equal division method.
[0082] S...
Embodiment 3
[0144] image 3 A schematic structural diagram of a local path planning device provided in Embodiment 3 of the present invention, as shown in image 3 As shown, the device includes:
[0145] The prediction duration determination module 301 is used to determine the prediction duration of the dynamic window method to predict the local path of the robot;
[0146] A segmentation module 302, configured to segment the predicted duration into at least two sub-segments;
[0147] A path generation module 303, configured to, in the i-th subsection, for each of the at least two first paths of the i-1th subsection, use the first path The end point of is the starting point, and the dynamic window method is used to generate at least two second paths;
[0148] The target path determination module 304 is configured to evaluate a plurality of partial paths composed of the first path and the second path, and select a partial path with the highest score from the plurality of partial paths as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More