

Method and system for matching ground elements between multiple batches of relative maps
A matching method and map technology, applied in the generation of 2D images, extraction of basic elements, image analysis, etc., can solve the problems that the results cannot always conform to the actual environment, and it is difficult to obtain reliable and stable results, so as to facilitate online operation, Reduce the intervention of complex rules and use sufficient effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
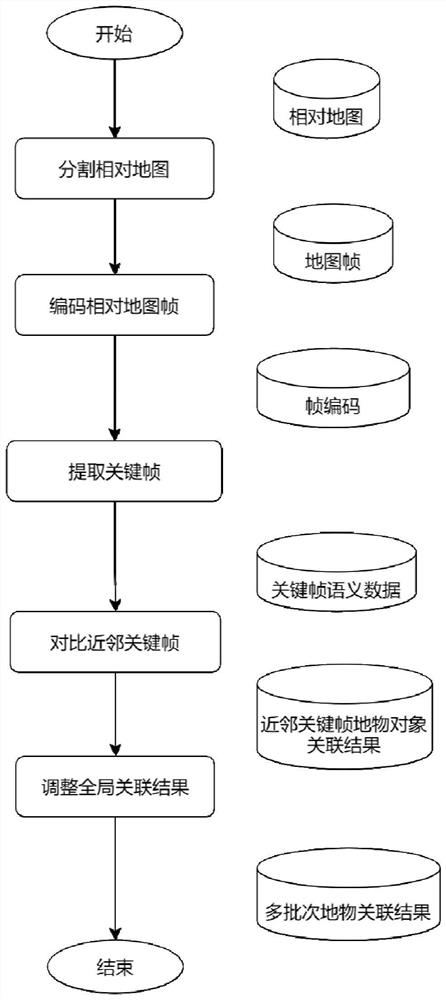
[0051] Embodiment 1 provided by the present invention is an embodiment of a method for matching ground elements between multiple batches of relative maps provided by the present invention, combining figure 1 As can be seen, embodiments of the matching method include:
[0052] Step 1: Select the map frame and its key points relative to the map, divide each map frame around the key point, and output the frame range of the map frame.
[0053] In a possible embodiment, the process of selecting the map frame and key points of the relative map in step 1 includes:
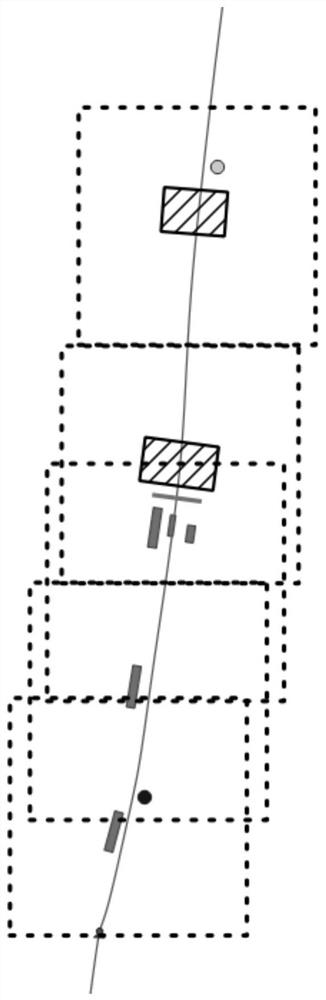
[0054] Along the track direction of the relative map, select the key points of the track according to the set distance interval, and use the key point as the center to establish the frame range of the set size area.
[0055] The size area is set to be a square, and the range of the side length of the square is 40±5 meters.
[0056] In a specific implementation, the set distance interval may be 20 meters, and the square ...
Embodiment 2
[0093] Embodiment 2 provided by the present invention is an embodiment of a matching system of ground elements between multiple batches of relative maps provided by the present invention, Figure 4 A structural diagram of a matching system for ground elements between multiple batches of relative maps provided by an embodiment of the present invention, combined with Figure 4It can be seen that the embodiment of the matching system includes: a frame range output module, a key frame acquisition module and an association result output module.
[0094] The frame range output module is used to select the map frame and its key points relative to the map, divide each map frame with the key point as the center, and output the frame range of the map frame.
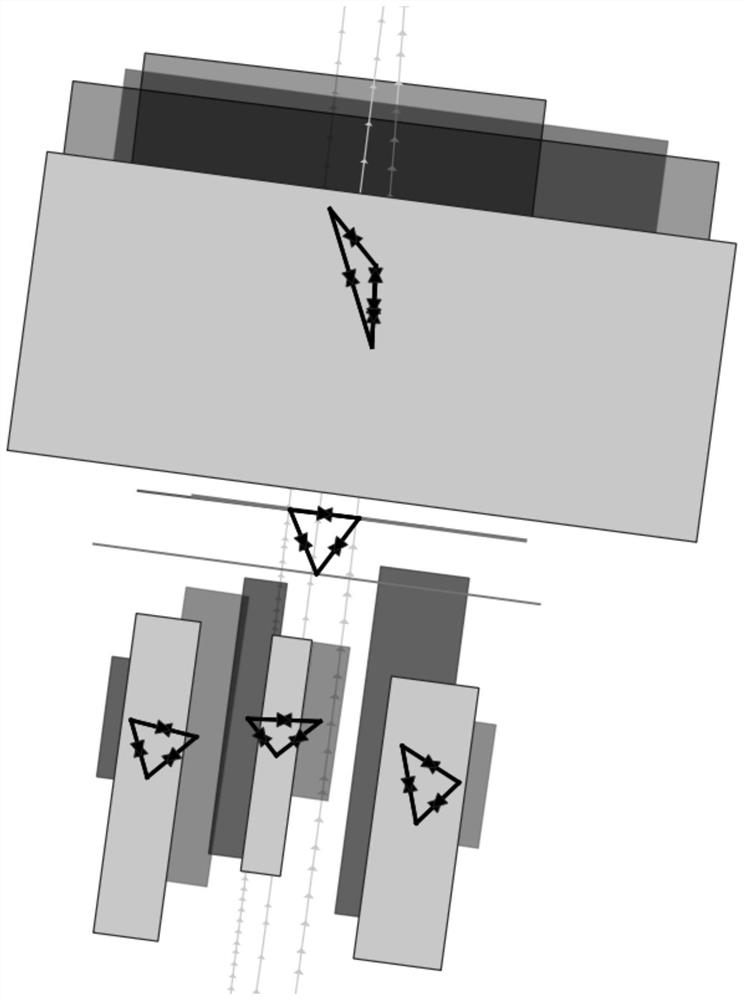
[0095] The key frame acquisition module is used to obtain the types and corresponding quantities of feature objects with reliable positions in the feature objects included in the frame range, and determine the key frames in the map...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More