

Road edge extraction method and device
An extraction method and curb technology, applied in the field of curb extraction methods and devices, can solve the problem of inaccurate extracted curb points, curb points falling outside the curb, and extracted curb points falling outside the curb, etc. problem, to achieve the effect of improving quality and drawing efficiency and ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] In order to make the content of the present invention more clearly understood, the present invention will be further described in detail below based on the specific embodiments and in conjunction with the accompanying drawings.
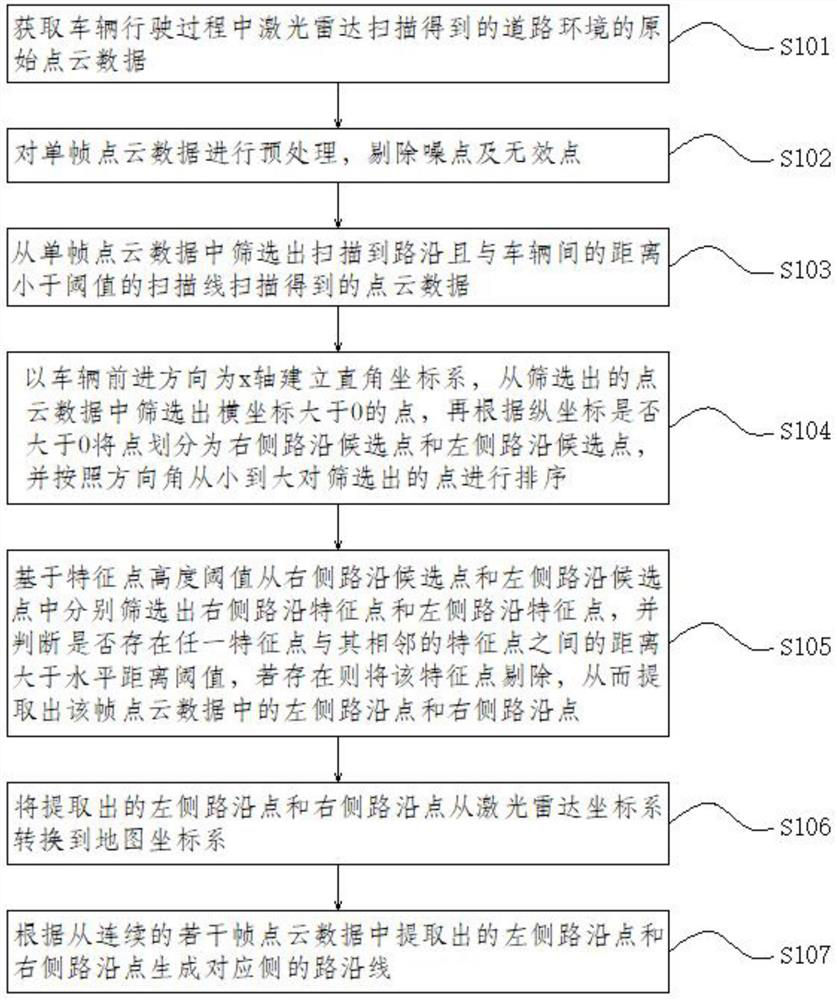
[0052] see figure 1 , is a schematic flowchart of the road edge extraction method provided in this embodiment. The method specifically includes steps S101 to S105, and the specific steps are described as follows:
[0053] Step S101: Obtain the original point cloud data of the road environment scanned by the lidar while the vehicle is running.
[0054] Specifically, while the collection vehicle is driving on the road, the laser radar continuously scans and collects the road environment around the vehicle to obtain the original point cloud data of the road section. It can be understood that the original point cloud data includes several frames of continuous point cloud data.
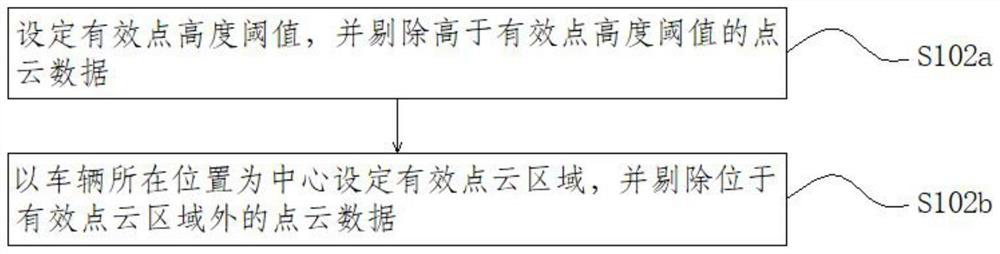
[0055] Step S102: Perform preprocessing on the single frame point c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More