

Robot for cleaning up attachments on damaged underwater surfaces of tunnels and method of use
A technology for robots and attachments, applied in manipulators, motor vehicles, hydroelectric power generation, etc., can solve the problems of inability to automate cleaning, poor cleaning effect, single cleaning tool, etc., to achieve excellent cleaning effect, improve cleaning effect, and high degree of automation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
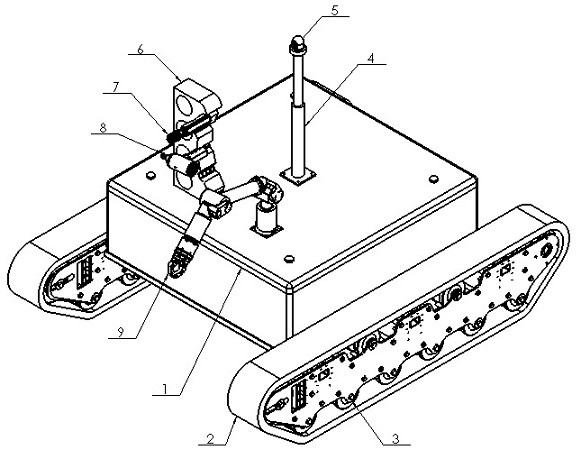
[0035] A cleaning robot suitable for attachments on damaged underwater surfaces of tunnels, such as figure 1 shown, including chassis 1, motion module, vision module, cleaning tool module and control communication module,
[0036] The motion module includes a pair of traveling wheels 3 and corresponding tracks 2. The two traveling wheels 3 are located on both sides of the chassis 1 respectively, and are symmetrically distributed with the center of the chassis 1. 2 is covered on the corresponding walking wheel 3, and then drives the robot to move underwater.
[0037] The vision module is located in the middle of the top of the chassis 1, and includes an electric lift rod 4 and a pan-tilt camera 5 connected to the electric lift rod 4. The top of the electric lift rod 4 is threaded to fix the pan-tilt camera 5, and the pan-tilt camera 5 is used to obtain water. Download the image to identify the defects and their positions on the underwater wall of the tunnel, so as to construct...
Embodiment 2
[0044] This embodiment discloses that the underwater surface cleaning robot performs on-site cleaning of the walls around the crack 11 underwater in the tunnel 10, such as Image 6 As shown, the tunnel 10 is a horseshoe-shaped water conveyance tunnel, and the crack 11 is located on the underwater side wall of the tunnel 10, which is a typical type of tunnel defect; Perform surface cleaning.
[0045] A method of using a robot for cleaning up attachments on damaged underwater surfaces of tunnels, and its work flow is as follows: Figure 7 shown, including the following steps:
[0046] Step S1: Put the cleaning robot into the underwater tunnel 10, obtain the picture information of the underwater damaged wall surface of the tunnel 10 through the vision module, transmit the picture information to the control communication module for identification, identify the underwater wall surface defects of the tunnel 10, and record the defects of the defects. Spatial position, according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More