

RCM positioning mechanism of surgical robot
A surgical robot and positioning mechanism technology, applied in surgical manipulators, surgical robots, supporting machines, etc., can solve the problems of doctor fatigue, reduce surgical precision and effect, etc. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
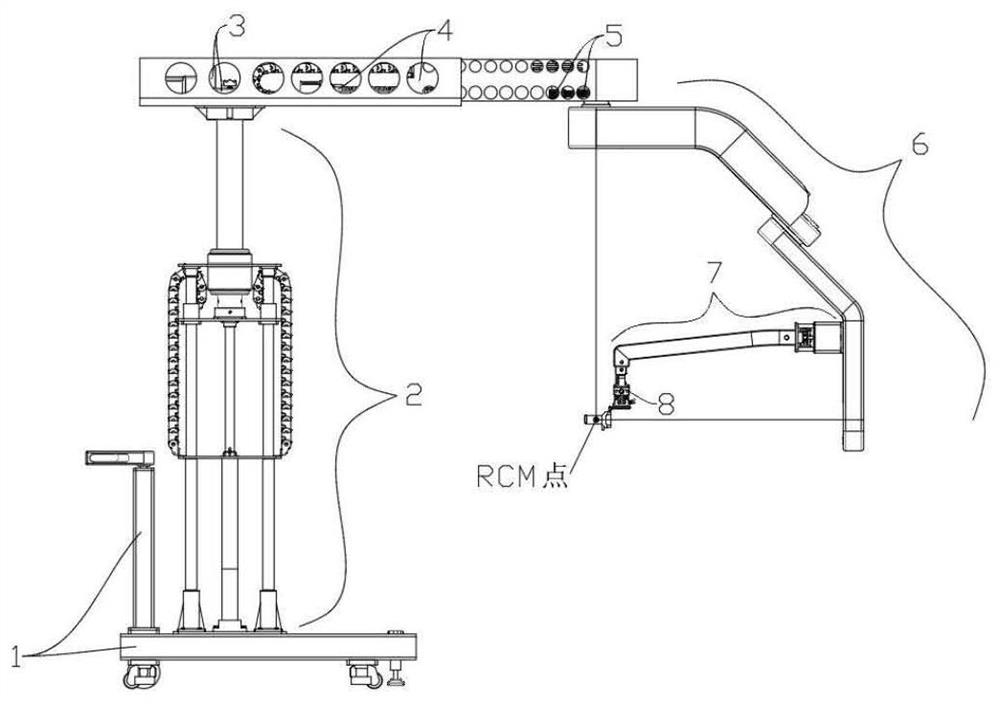
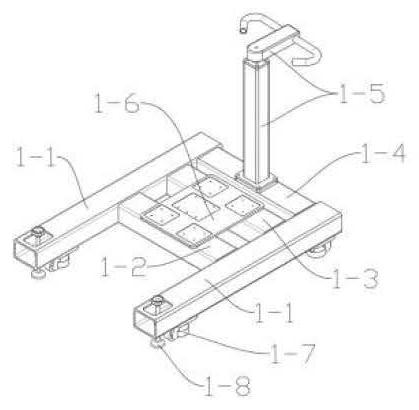
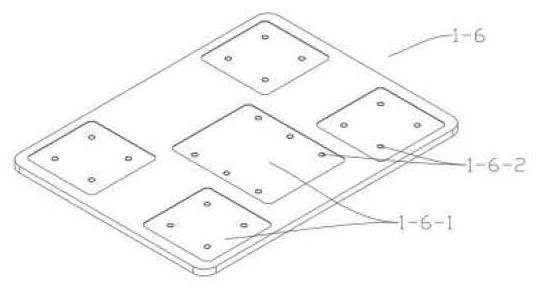
[0231] like Figure 1 to Figure 44 As shown, this embodiment provides an RCM positioning mechanism of a surgical robot, including: a robot moving base 1, a vertical lifting mechanism 2, a front-end rotation mechanism 3, a horizontal telescopic mechanism 4, a first rotation mechanism of the RCM arm, and a first rotation mechanism of the RCM arm. Two rotation mechanism 6 , detachable card holding stamp mechanism 7 , card stamp fine-tuning quick change mechanism 8 .
[0232] Various modifications of the present embodiment are described in detail below.
[0233] like figure 1 shown,
[0234] The RCM positioning mechanism of the surgical robot includes a robot moving base 1, a vertical lifting mechanism 2, a front-end rotation mechanism 3, a horizontal telescopic mechanism 4, a first rotation mechanism of the RCM arm 5, a second rotation mechanism of the RCM arm 6, a detachable type. Card-holding stamp mechanism 7 , card stamp fine-tuning and quick-change mechanism 8 .
[0235]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More