Industrial robot inspection platform based on target identification
An industrial robot and target recognition technology, applied in the field of industrial robot inspection platform based on target recognition, can solve problems such as increased workload, inability to move, data deviation, etc., achieve stable and accurate detection work, improve cleaning effect, improve The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The technical solution of the present patent will be described in further detail below in conjunction with specific embodiments.
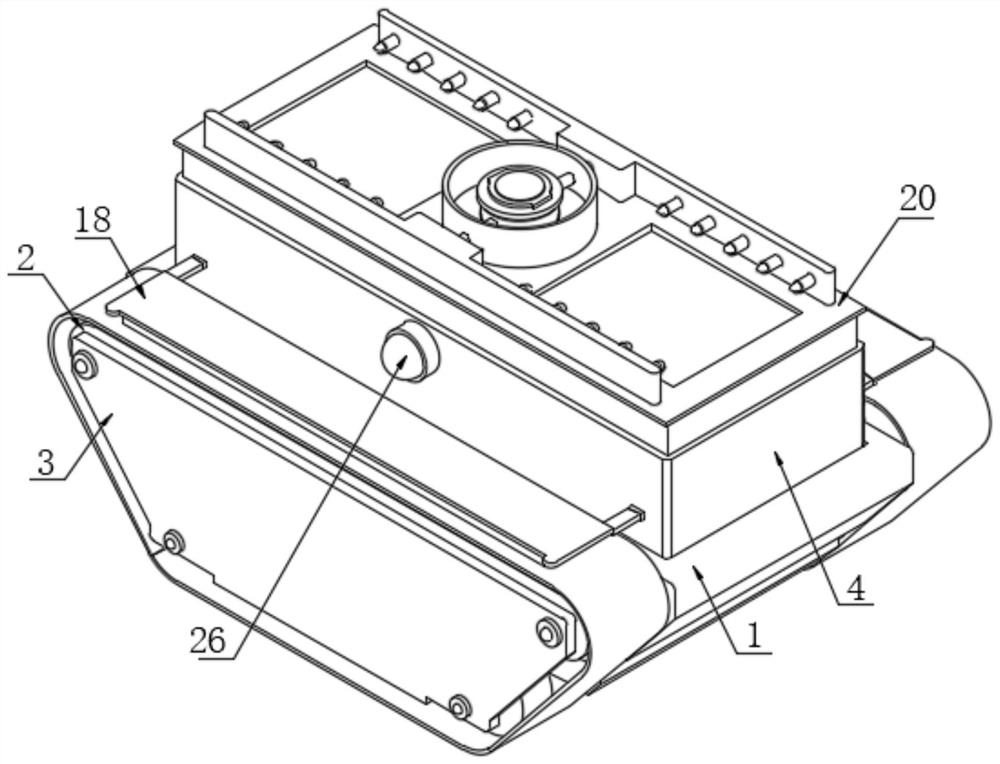
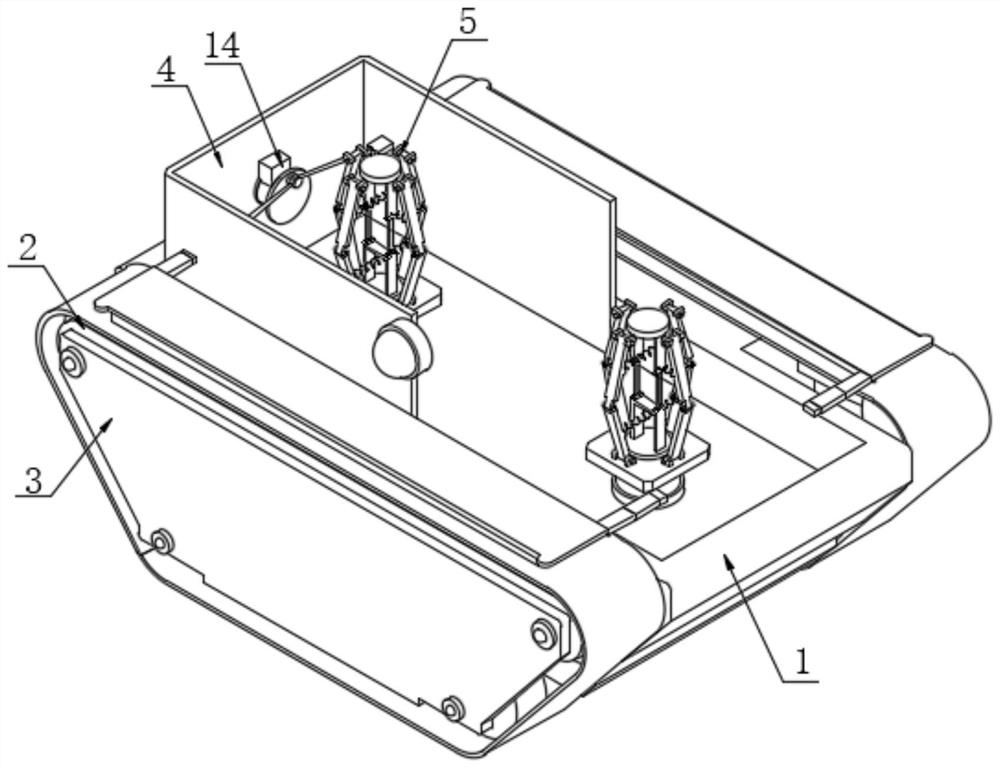
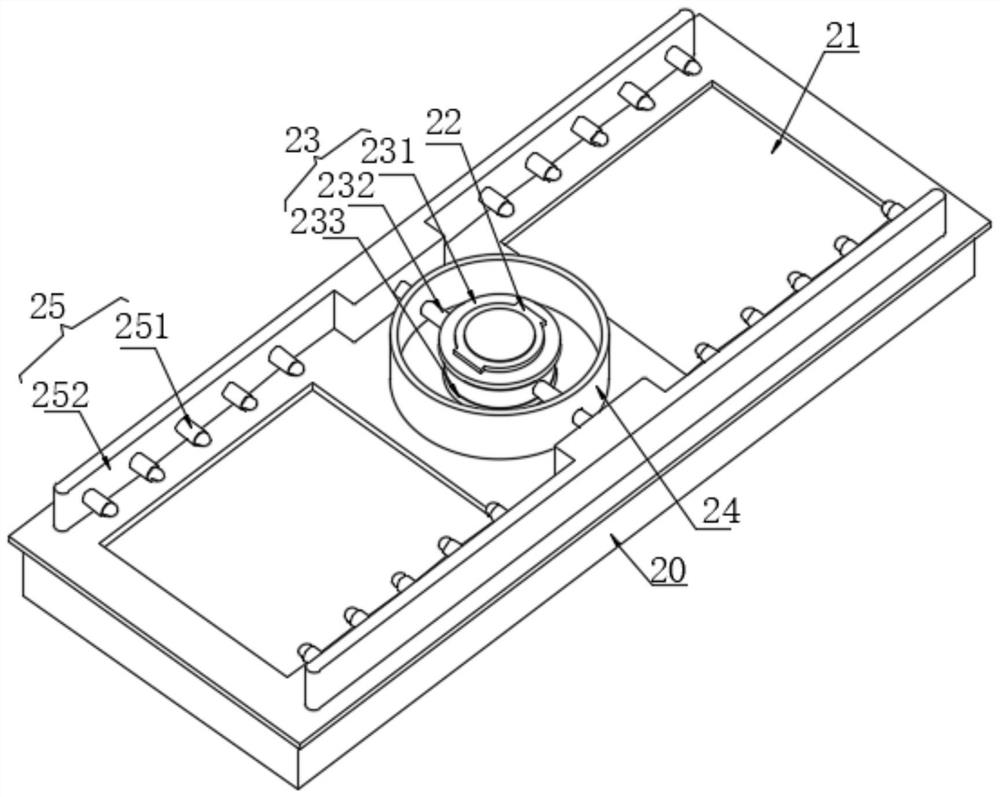
[0031] like Figure 1-6As shown, the present invention provides a technical solution: an industrial robot inspection platform based on target recognition, comprising an inspection base 1, and the front and rear sides of the inspection base 1 are provided with crawler belts 2, and the two crawler belts 2 are far away from each other. One side is provided with a side plate 3, the upper surface of the inspection base 1 is fixedly connected with the lower surface of the connecting base 4, and two uprights 8 are arranged in the connecting base 4, and the bottom ends of the two uprights 8 are both connected with the inspection base 1. The upper surface is fixedly connected, the top end of the column 8 is fixedly connected with the lower surface of the fixed plate 7, the inner wall of the connecting seat 4 is overlapped with the outer wall of the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com