

Underwater terrain matching and positioning method and system of three-dimensional imaging sonar point cloud
An underwater terrain matching and three-dimensional imaging technology, which is applied in the re-radiation of sound waves, neural learning methods, radio wave measurement systems, etc., can solve the problems of low robustness, low positioning accuracy, and large amount of data. Small error, reduce precise positioning, improve the effect of matching effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings, so that the advantages and features of the present invention can be more easily understood by those skilled in the art, and the protection scope of the present invention can be more clearly defined.
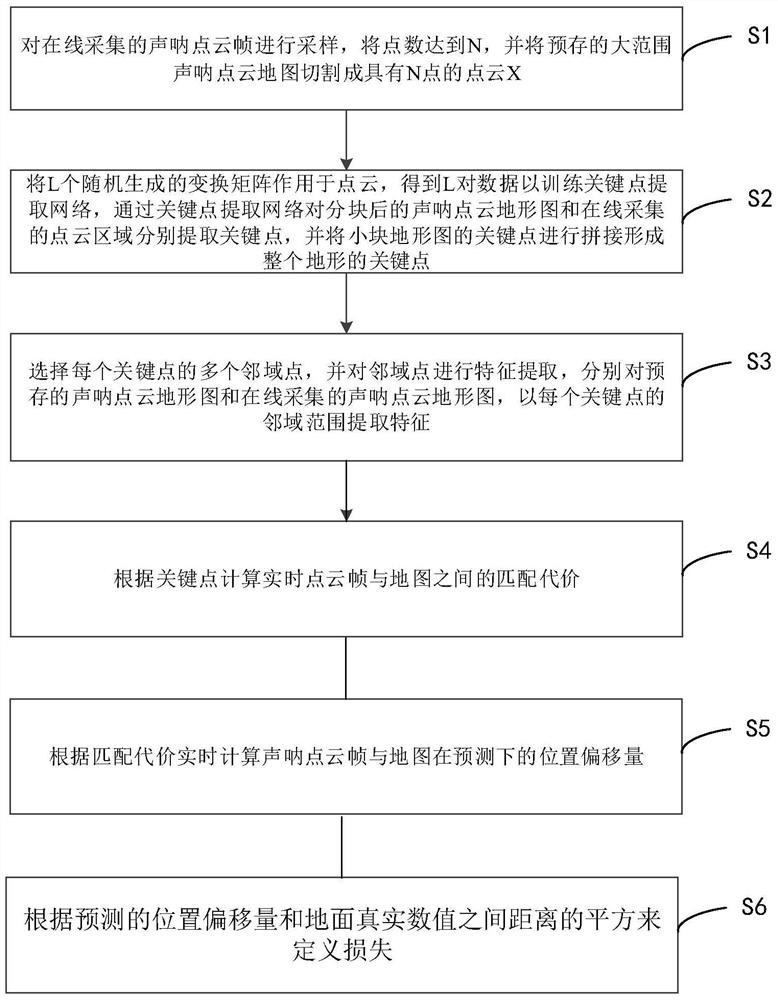
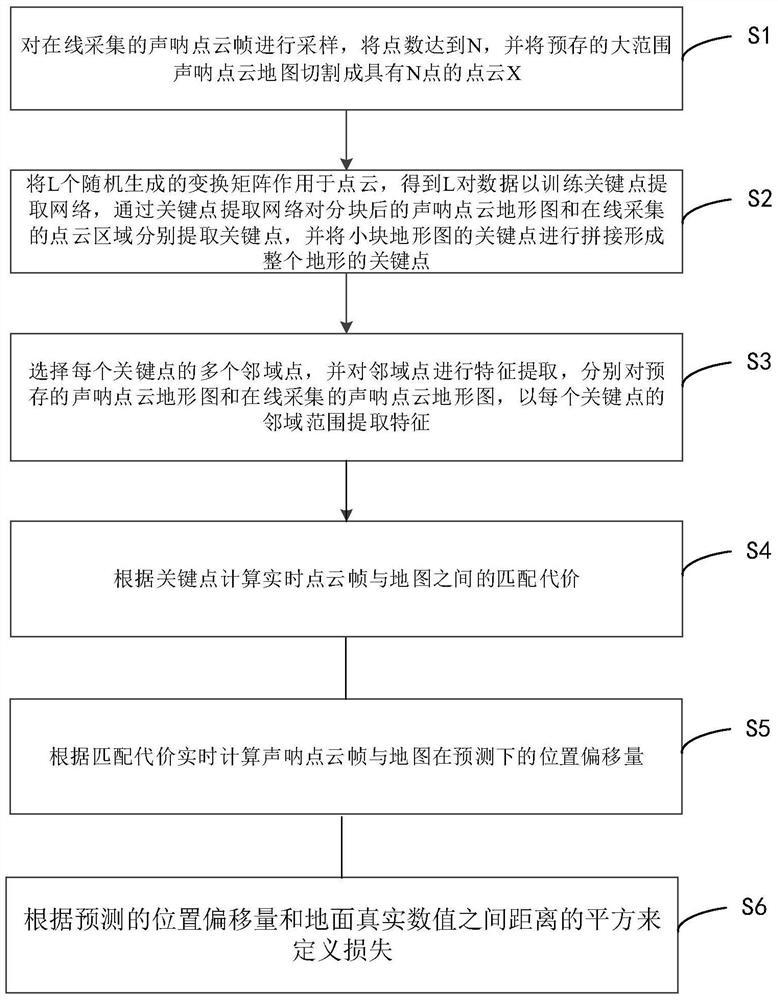
[0046] see figure 1 As shown, this embodiment discloses an underwater terrain matching and positioning method for a three-dimensional imaging sonar point cloud, which includes the following steps:
[0047] Step S1, sampling the sonar point cloud frame collected online, the number of points reaches N, and cutting the pre-stored large-scale sonar point cloud map into a point cloud X with N points;
[0048] Step S2, convert L randomly generated transformation matrices {T 1 ,…,T L },T L ∈SE(3) acts on the point cloud X=[X 0 ,…,X N ]∈R 3×N , get L pairs of data To train the key point extraction network, the key points are extracted from the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More