Collision-free polynomial trajectory generation method based on unmanned aerial vehicle
A trajectory generation, polynomial technology, applied in 3D position/channel control, navigation calculation tools, etc., can solve the problems of “knotted” trajectory, lack of trajectory time allocation strategy, and reduced trajectory quality, etc., to achieve adaptability, improve Quality, universally adaptable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The present invention will be described in further detail below with reference to the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
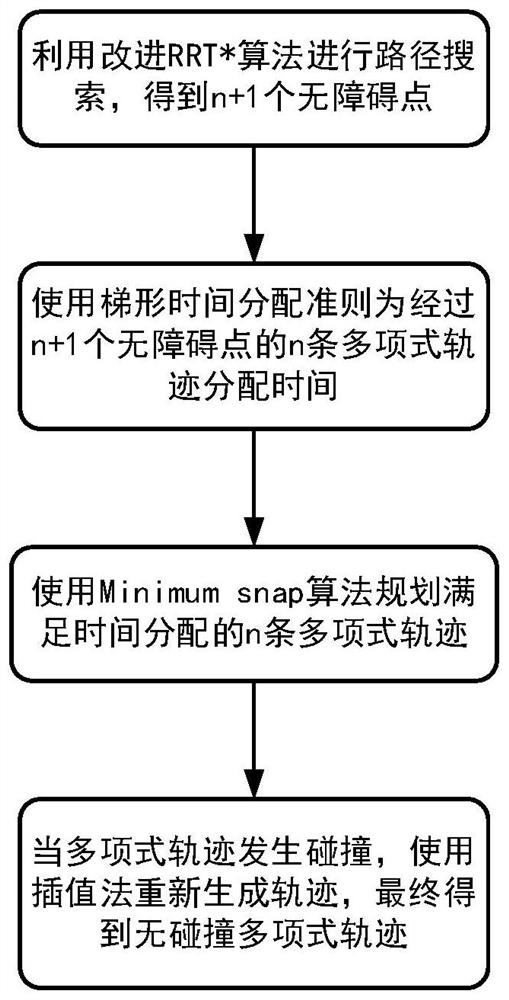
[0044] like Figure 1 to Figure 9 As shown, this embodiment provides a method for generating a collision-free polynomial trajectory based on a UAV, using an improved RRT* path search algorithm, a trapezoidal time allocation criterion and an interpolation method to finally generate a collision-free polynomial trajectory, including the following steps:
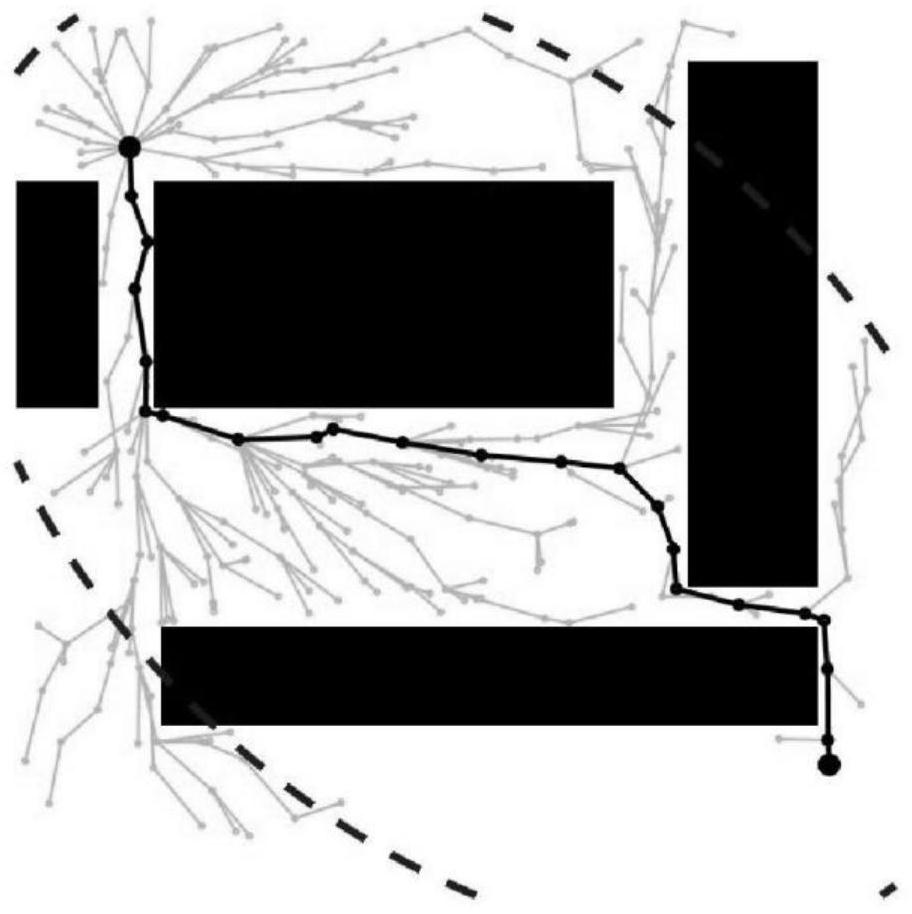
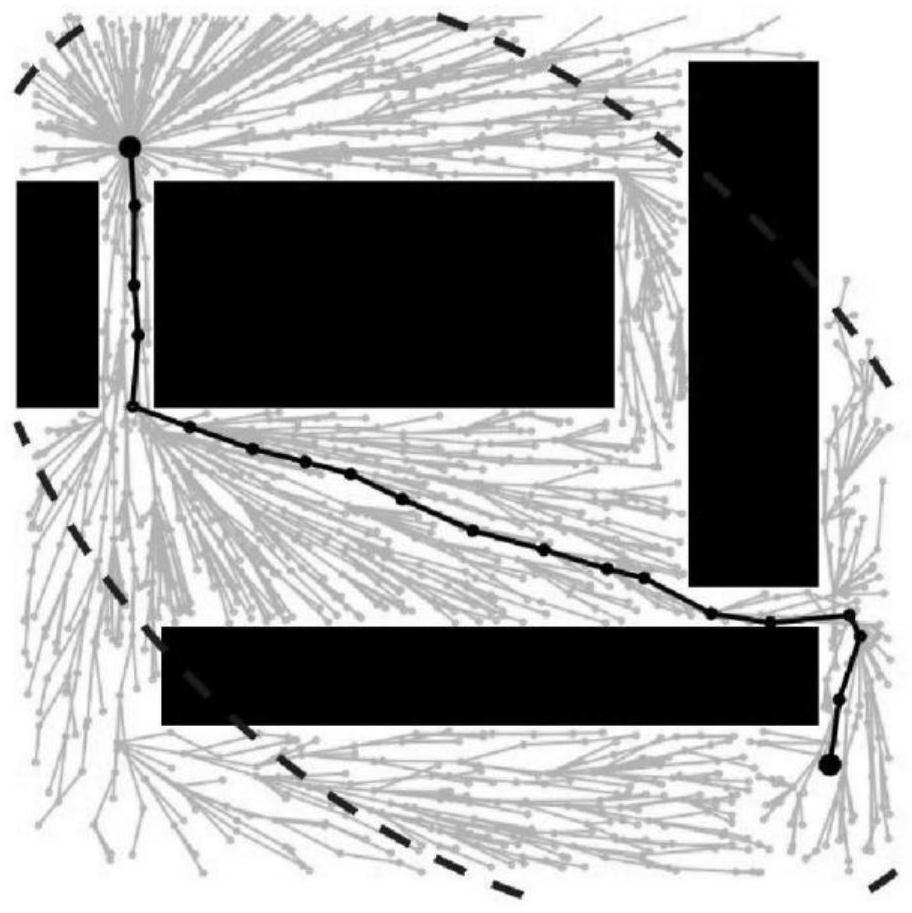
[0045] 1) On a map containing obstacles, use the improved RRT* path search algorithm to perform a path search to obtain n+1 barrier-free points, where n is a positive integer; wherein, the barrier-free points refer to points that are not in the barrier , the improved RRT* path search algorithm adds ellipse constraints on the basis of the RRT* path search algorithm to ensure that the generated random sampling points are const...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com