

Unmanned inspection robot and control method thereof
A technology of inspection robot and control method, which is applied in the field of inspection, can solve problems such as difficulty in path planning of unmanned inspection robots, and achieve the effect of ensuring planning accuracy and robustness, and facilitating movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
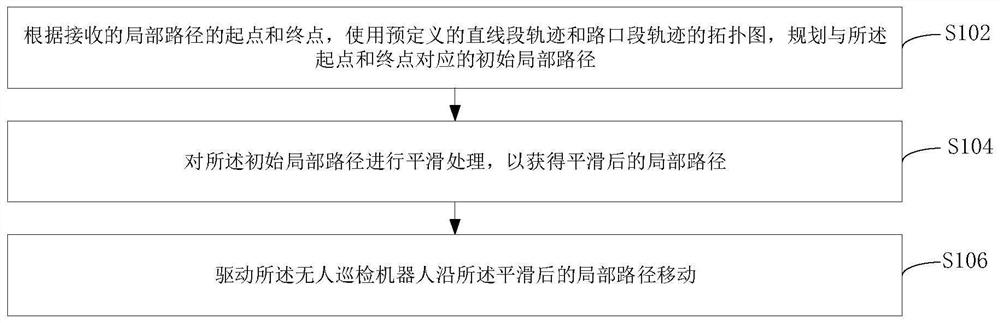
[0024] refer to figure 1 , showing a schematic flowchart of the steps of the control method for the unmanned inspection robot according to the embodiment of the present application.
[0025] The method includes the following steps:
[0026] Step S102: According to the received starting point and ending point of the partial path, use the predefined topological map of the straight line segment trajectory and the intersection segment trajectory to plan an initial partial path corresponding to the starting point and the ending point.
[0027] Step S104: Smoothing the initial local path to obtain a smoothed local path.
[0028] Step S106: Drive the unmanned inspection robot to move along the smoothed local path.
[0029] Through the above method, by predefining the trajectories that the unmanned inspection robot can travel on the wall, and planning based on the predefined trajectory when needed, the rapid planning of the local path of the unmanned inspection robot can be quickly ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More