Bionic deformable hexapod robot
A hexapod robot and fuselage technology, applied in the field of bionic deformable hexapod robots, can solve the problems of low motion efficiency, poor terrain adaptability, slow motion speed, etc., and achieve strong adaptability, improve freedom, and improve flexibility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in detail below with reference to the accompanying drawings and embodiments.
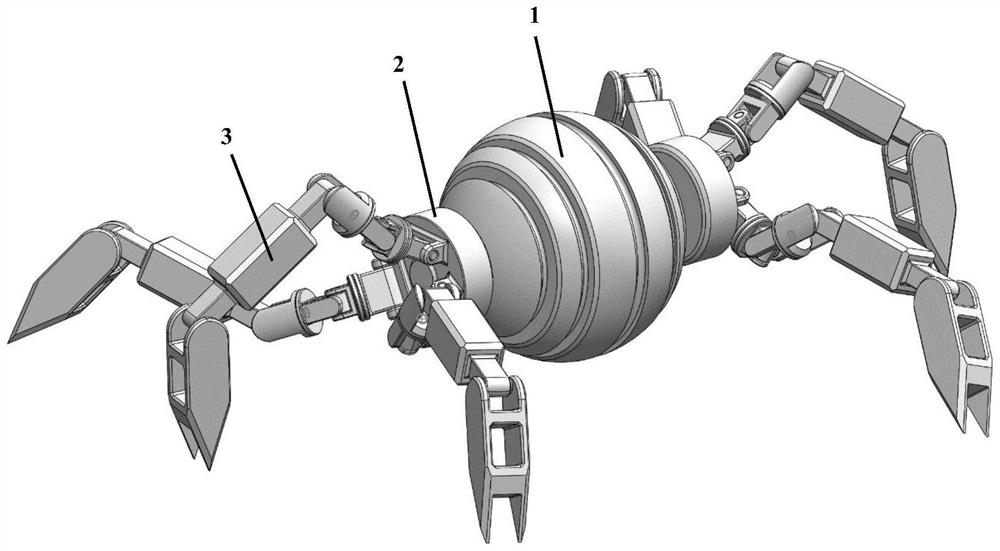
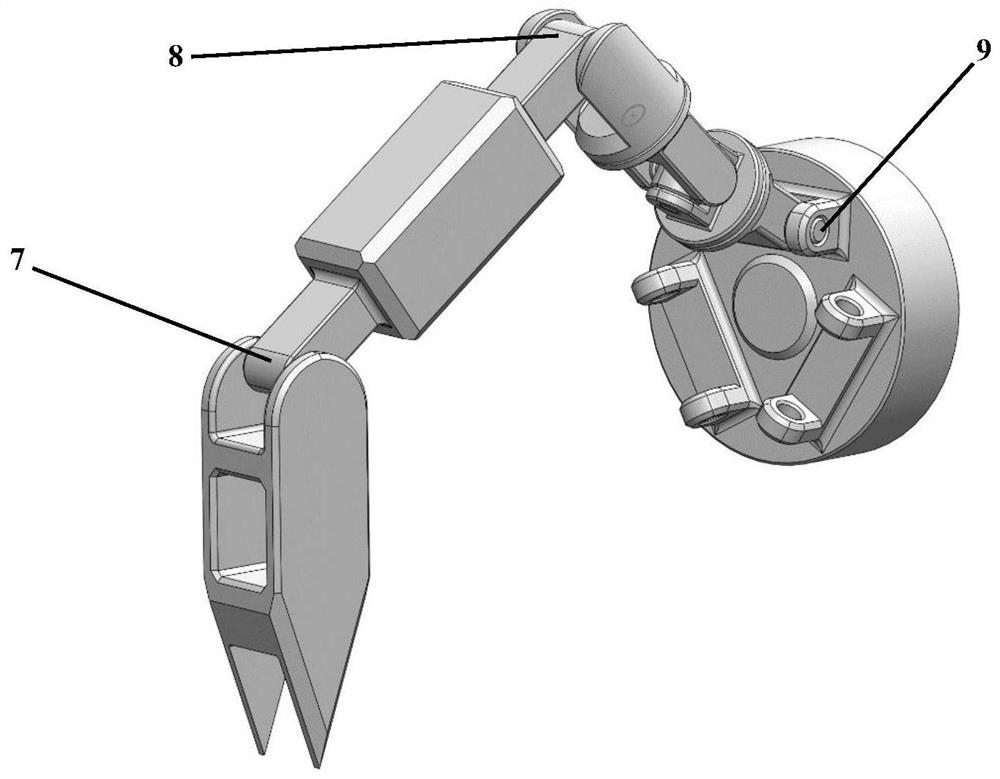
[0028] The technical solution adopted in the present invention is a bionic hexapod robot, and the appearance of the robot is as follows: figure 1 As shown, it includes a fuselage 1, a wheel foot disc 2, and a leg 3. The fuselage 1 is designed to be spherical, so as to ensure that the center of gravity of the fuselage is relatively stable, and will not be deflected due to the movement of the legs and the wheel feet. The six legs 3 are divided into two groups, each group has three legs, and the two groups of three legs are arranged symmetrically along the two sides of the fuselage 1; When traveling under the structure, the three legs 3 of each group can keep a relatively static state to move forward. The joint 9 is provided with a motor, which can drive the leg 3 to rotate around the joint 9 relative to the wheel foot plate to complete the required acti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More