

Artificial limb control system and method with energy recovery and gait recognition functions
A technology of gait recognition and energy recovery, applied in character and pattern recognition, neural learning methods, prostheses, etc., can solve the problems of reduced battery life of prosthetics, and achieve the effects of good adaptability, easy acquisition, and extended battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in detail below with reference to specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that, for those skilled in the art, several changes and improvements can be made without departing from the inventive concept. These all belong to the protection scope of the present invention.
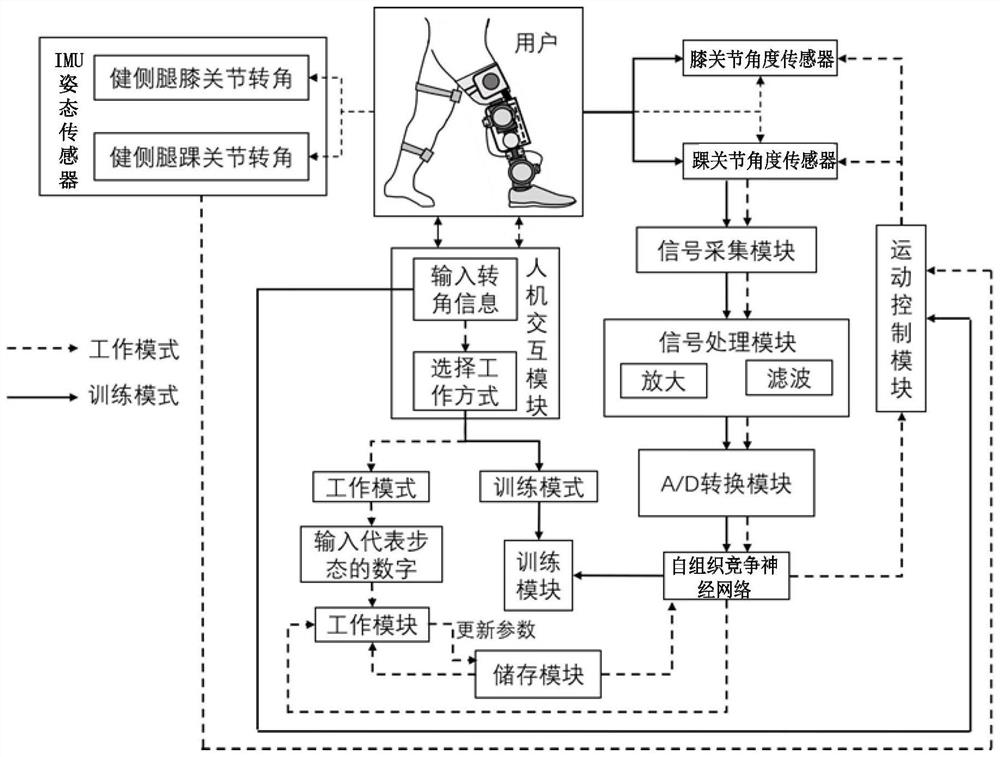
[0062] The present invention provides a prosthetic limb control system with energy recovery and gait recognition functions of the present invention, which includes an energy recovery module, a gait recognition module, a motion control module and a structural component. The gait recognition module is mainly used for gait recognition, modeling the motion state of the lower limbs in daily life through the angle information at the knee and ankle joints, and then using the self-organizing competitive neural network t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More