Path planning method for complex boundary farmland and farmland machine operation system
A path planning and agricultural machine technology, applied in two-dimensional position/channel control, climate change adaptation, etc., can solve the problems of low coverage and poor adaptability of path planning, achieve strong adaptability, meet agronomic requirements, and improve coverage The effect of rate and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
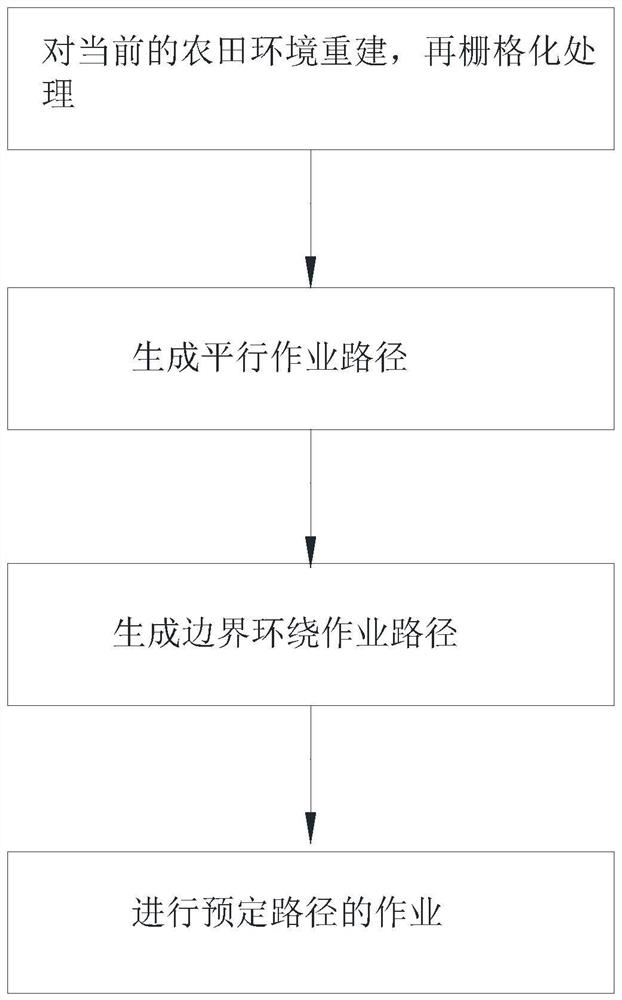
[0060] like figure 1 and figure 2 As shown, this embodiment discloses a path planning method for farmland with complex boundaries, which is used to plan a working path for agricultural machines, including the following steps:
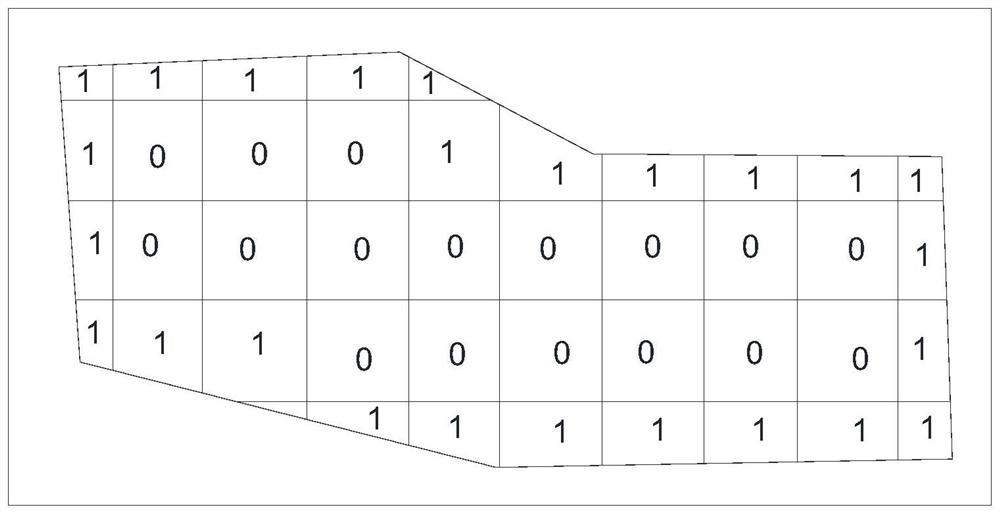
[0061] S1: Reconstruct the current farmland environment to obtain an initial farmland map, and then perform grid processing on the initial farmland map to obtain a path planning map;
[0062] S2: generate a parallel operation path on the path planning map;
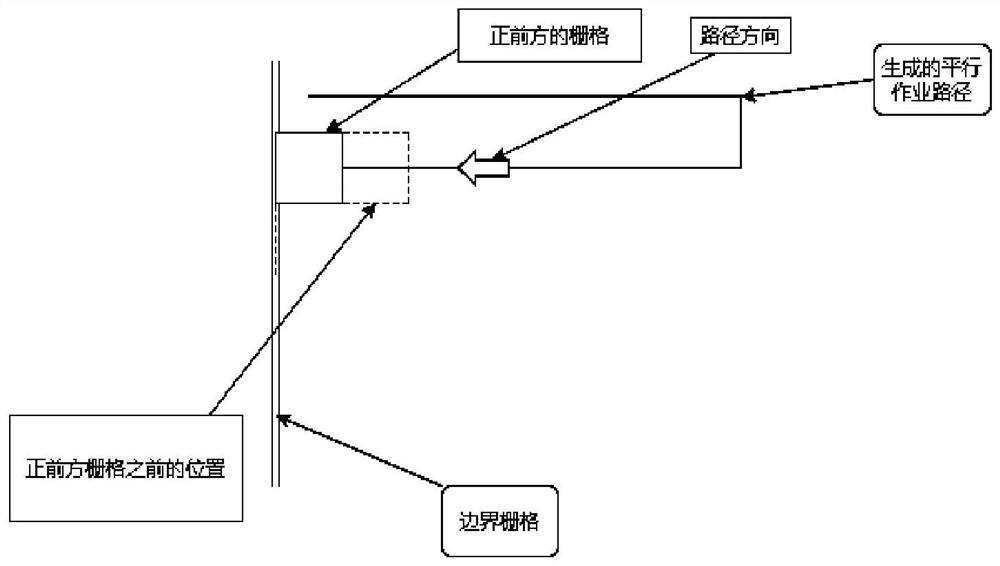
[0063] S3: Generate a boundary surrounding operation path on the parallel operation path;
[0064] S4: The agricultural machine performs an operation on a predetermined route on the current farmland.
[0065] Wherein, in step S1, the specific steps of reconstructing the current farmland environment are:
[0066] S11: Scan the current farmland environment to obtain point coordinate information of the farmland boundary; specifically, the point coordinate information is the three-dimensional coord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com