

Method for evaluating time delay tolerance capability of unmanned aerial vehicle control system
A control system and time-delay tolerant technology, applied in mechanical equipment, combustion engines, electrical testing/monitoring, etc., can solve problems such as instability, achieve simple methods, strong engineering practicability, and improve safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
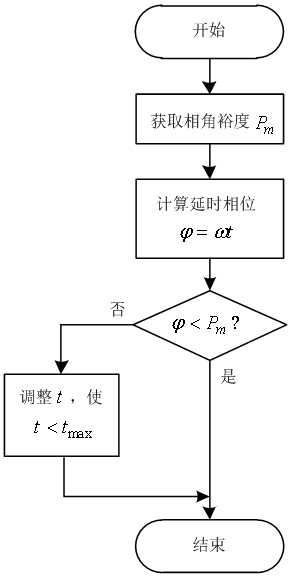
[0035] A method for evaluating the ability of drone control systems for the drone control system in this embodiment, such as figure 1 The examples shown in this implementation are made public: step s1. Get the open -loop phase of the drone control system;
[0036] Step s2. Based on the relationship between bandwidth and delay, calculate the lag of the drone control system;
[0037] Step s3. Compare the lagging phase of the drone control system and the riots of the open ring phase angle to determine whether the drone control system has tolerance for delay;
[0038] Step S4. Based on the relationship between the bandwidth of the phase angle and the drone control system, calculate the maximum delay value to tolerate;
[0039] Step s5. To tolerate the maximum delay in the entire flight control system according to the maximum delay value of tolerance.
[0040] In this embodiment, it provides a method of tolerating the delay of the drone control system. It is not only easy to implement,...
Embodiment 2
[0042] This embodiment 1 is further optimized on the basis of embodiment 1.
[0043] Step s1.1. Get the opening of the ring phase angle of the drone control system PM;
[0044] Step S1.2. Decepse frequency W according to the drone control system c , Passing function G (JW c ), Feedback channel transmission function H (jw c ) The increasing phase of the open ring phase angle PM obtains the open -loop phase angle of the unmanned and control system after reducing the critical stable expression after PM, and it is expressed as: ∠g (JW (JW (JW (JW (JW c ) ∠h (jw c ) -Pm = -180 °.
[0045] In this embodiment, G (jw c ) And h (jw c ) All are open -loop transmission functions, which are the transmission function of the control loop. G (JWC) is the transmission function of the front channel. H (JWC) is the transmission function of the feedback channel. In this embodiment, the open -loop phase angle of the drone control system is calculated by the system's amplitude calculation frequency, a...
Embodiment 3
[0048] This embodiment is further optimized on the basis of the above embodiment 1 or 2.
[0049] The expression of the lag of the drone control system φ is φ = ωt. Among them, ω is the bandwidth of the drone control system, the unit is RAD / S, and T is delayed, and the unit is S.
[0050] In this embodiment, by calculating the lagging phase of the drone control system, the lagging phase of the drone control system is smaller than that of the phase angle, and when the hysteresis of the drone control system is less than the phase angle, then then The drone control system has the ability to tolerate this latency, and then can evaluate the control system's ability to tolerate the delay. When the lagging phase of the drone control system is greater than or equal to the angle of the phase angle, the delay needs to be adjusted. The adjustment of the extension requires the maximum delay value first, and then adjust the delay to make the time delay less than the maximum delay value. Delaye...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More