

Helicopter nonlinear increment adaptive dynamic optimization control method
A dynamic optimization and control method technology, applied in the field of aircraft control, can solve problems that are not considered and limited, and achieve the effect of reducing the impact
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0240] The following describes the helicopter nonlinear incremental adaptive dynamic optimization control method of the present invention in further detail in conjunction with Embodiment 1 of the Bo-105 helicopter centripetal turning maneuver tracking control:
[0241] The method specifically includes:
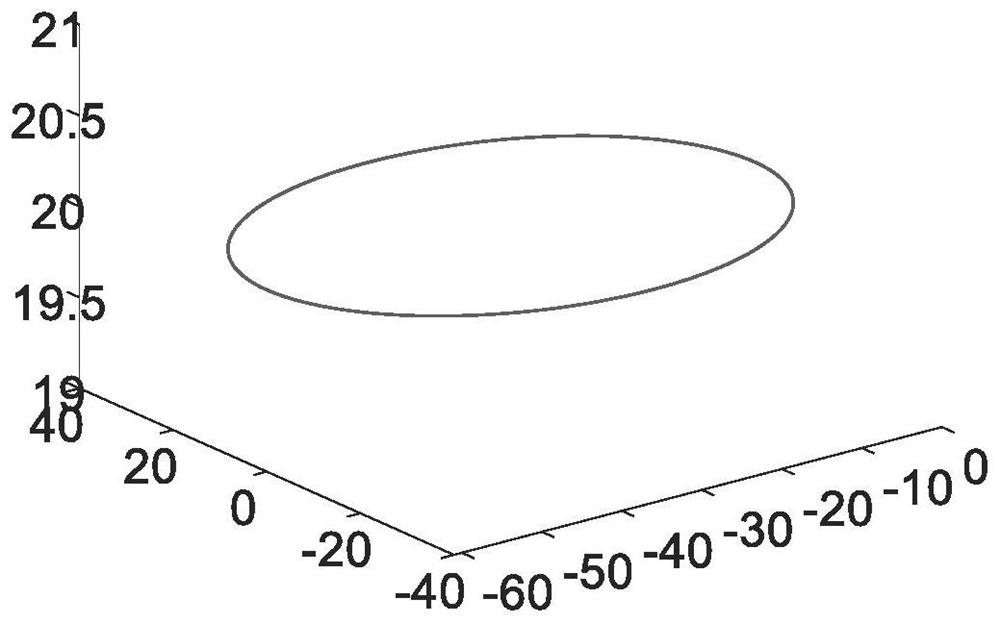
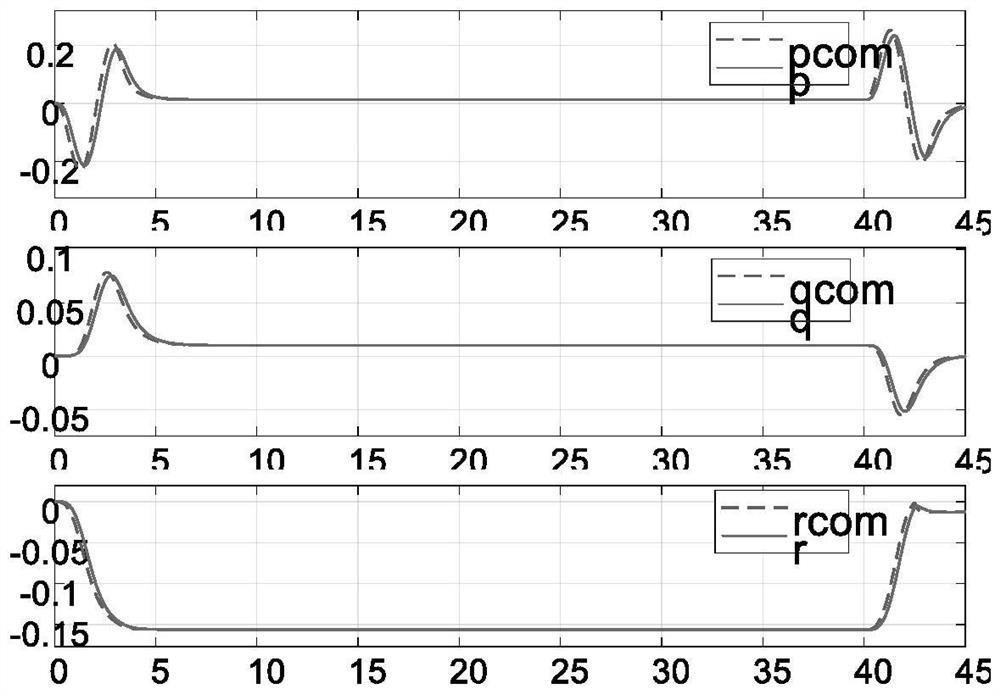
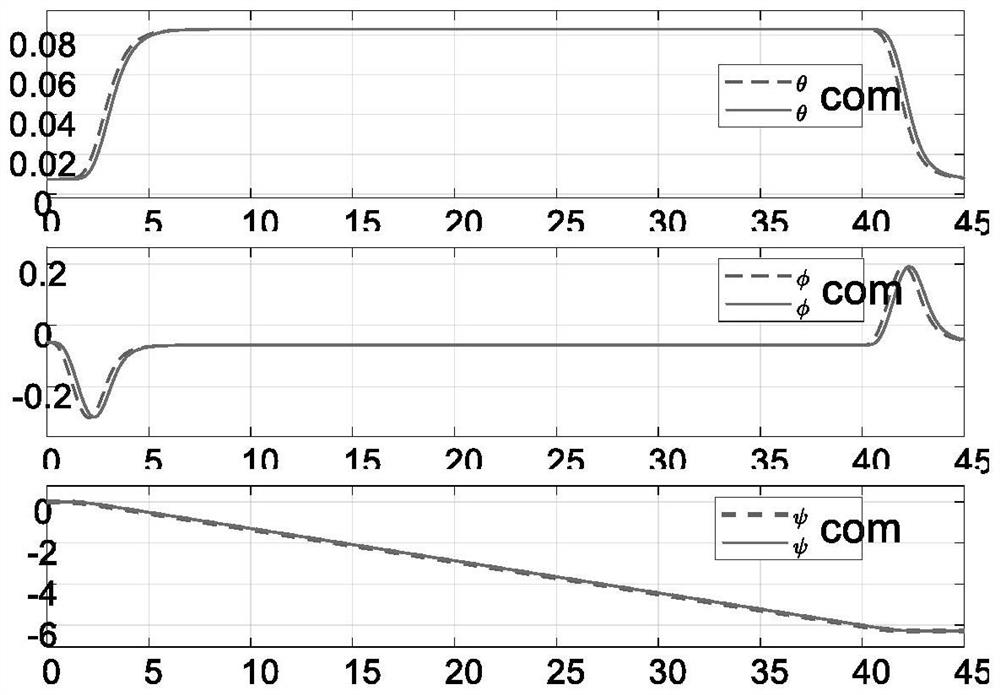
[0242] Step 1. Establish the dynamic mathematical model of helicopter maneuvering flight for the medium maneuvering subject "centripetal rotation" in ADS-33E-PRF, specifically:
[0243] Establishment of Mathematical Model of Flight Trajectory for Centripetal Rotation Maneuver
[0244] Through the research on performance index of centripetal turning maneuver in ADS-33E-PRF helicopter flight quality specification, mathematical models are established respectively according to its boundary conditions. The satisfactory performance of the centripetal rotation subject requires that the body should rotate once within 45s. Taking counterclockwise rotation as an example, the helicopter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More