AI technical title is built by Patsnap AI team. It summarizes the technical point description of the patent document.
A technology of human motion and recognition methods, applied in the field of motion recognition, can solve problems such as the skeleton structure and influence of the human body that cannot be well represented, and achieve the effect of reducing data storage and computing overhead
Pending Publication Date: 2022-08-05
国家体育总局体育信息中心
View PDF0 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
However, the above methods cannot represent the skeleton structure of the human body very well. The skeleton data of the human body is a graph structure, and each joint affects the points it connects.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
specific Embodiment approach 1
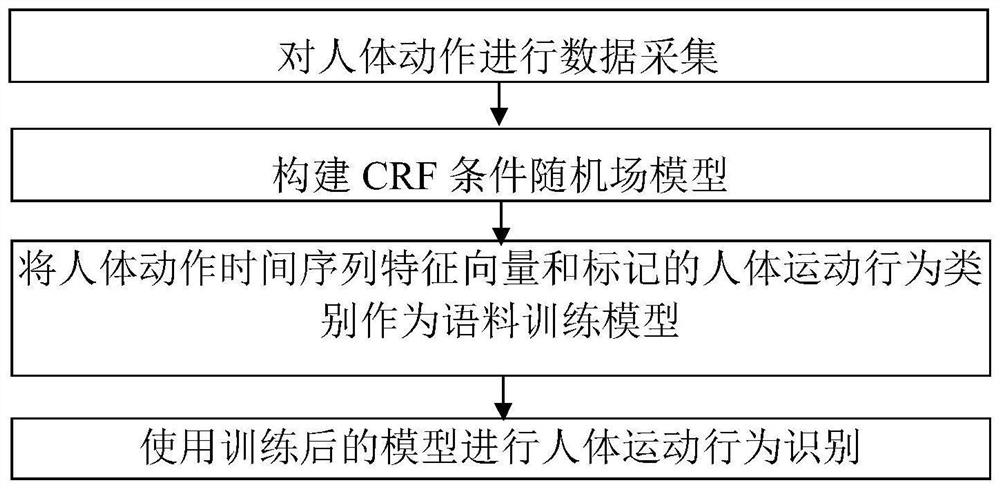
[0014] Specific implementation one: as figure 1 As shown, a method for recognizing human motion behavior described in this embodiment includes the following steps:
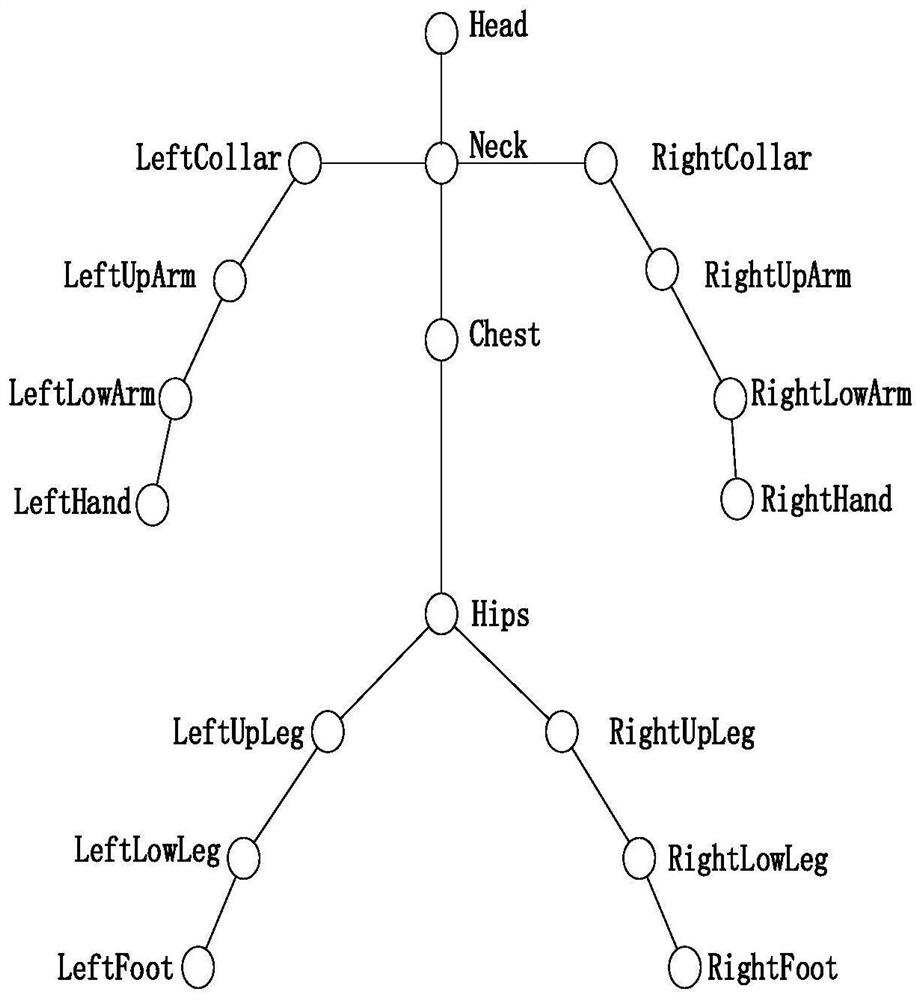
[0015] Step 1. Use the motion capture system to collect data on multiple movements of the human body, and use 9-axis sensors for all joints of the human body when collecting the data of each movement, such as figure 2 As shown, the 9-axis sensor includes a 3-axis accelerometer, a 3-axis gyroscope, and a 3-axis magnetometer, and the acquisition includes the three-axis accelerometer data, the three-axis gyroscope data, the three-axis magnetometer data, and the three-axis attitude angle. the raw data of the data;
[0017] Step 3: Convert the time series of human motion raw data including all joints into feature vectors, mark the corresponding motion types, and...
specific Embodiment approach 2
[0020] Embodiment 2: In Embodiment 2, a fixed number of implicit sequences are defined. The CRF model is trained by using the time seriesfeature vector, latent sequence and human motion behavior type of human motion raw data as corpus.
[0021] A fixed number of implicit sequences are defined, and semantic features of human motion behavior are assigned to the implicit sequences, which can greatly reduce the number of elements in the implicit sequences and improve the training efficiency.
[0022] For example, a latent sequence can be defined based on how much each joint changes between two frames. Suppose 10 joints are selected, and the 60-degree variation range of each joint in the space X plane, Y plane and Z plane is used as an element of the implicit sequence, which can be defined to include 3 3 *10 = implicit sequence of 270 elements.
[0023] Implicit sequences can also be defined based on the direction of motion of each joint. Assuming that 10 joints are selected, t...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
technical field [0001] The invention belongs to the technical field of motion recognition, and in particular relates to a method for recognizing human motion behavior. Background technique [0002] The motion capturesystem based on inertial measurement unit (IMU) is the most promising in commercial development, it can be used almost anywhere, and it truly realizes the collection of motion data that is not constrained by the scene. Several full-body human motion capture systems have been used in the computer graphics and animation industries. The data obtained using the motion capture method is more accurate than the way data is collected from video. Human motion capture data, as a time series, records the spatiotemporal information of each node when the human body is in motion, and the information of each node at each moment describes a human body posture. [0003] After the IMU measurement unit collects the motion data, it is necessary to perform subsequent processing on...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More