

Autonomous multi-platform robot system
A technology of robots and mobile robots, which is applied in control/regulation systems, radio wave measurement systems, satellite radio beacon positioning systems, etc., and can solve problems such as delays
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] 1 Introduction
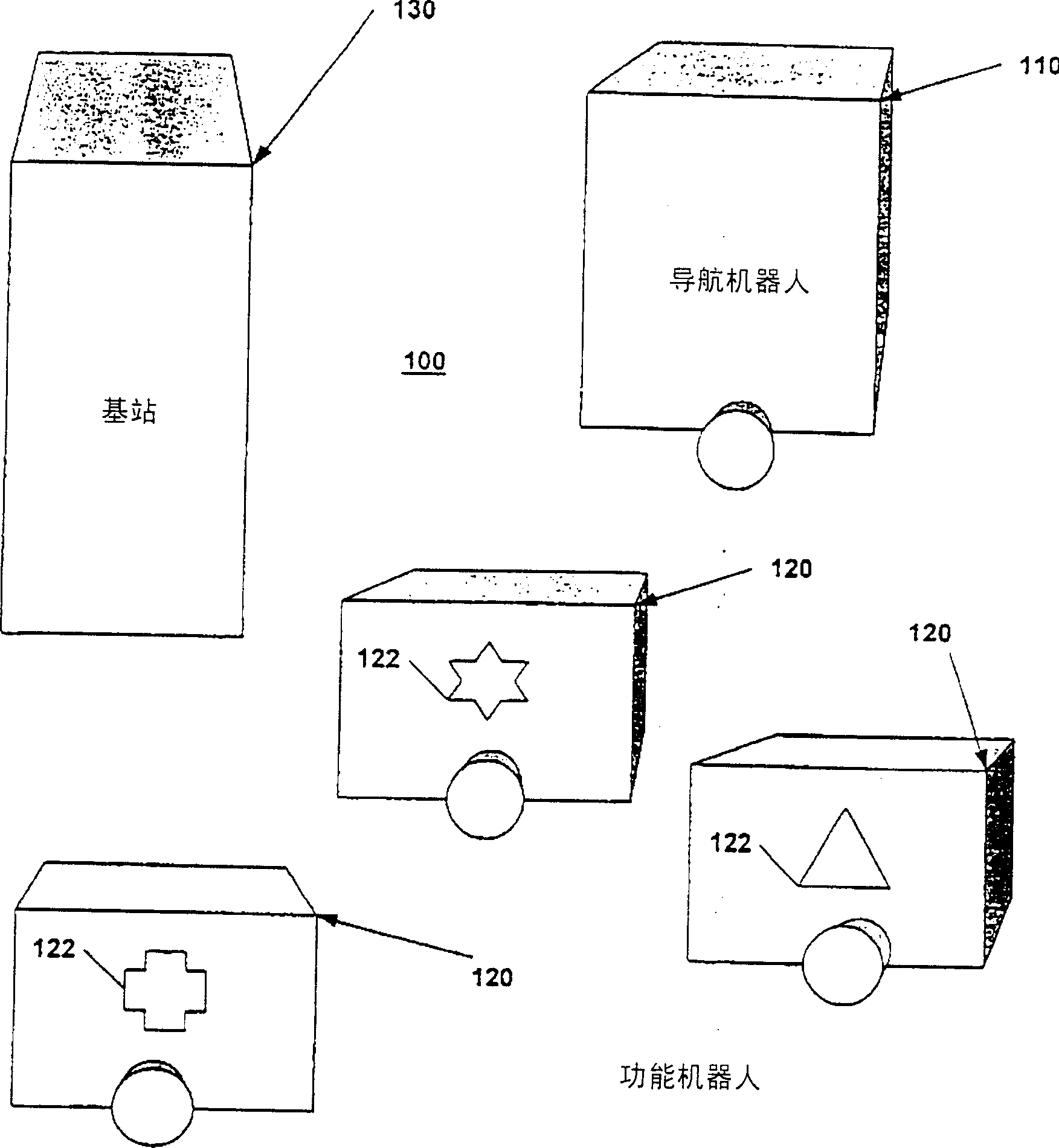
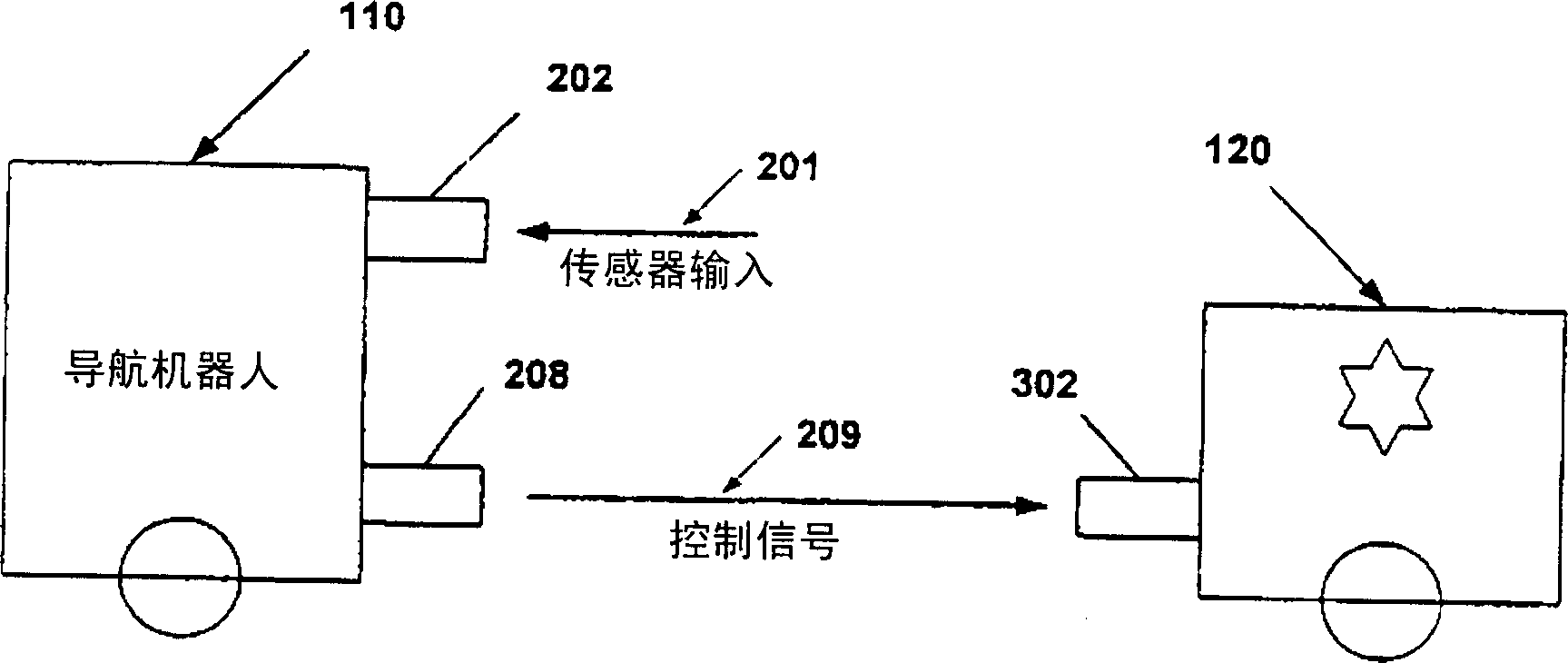
[0041] The present invention is directed to systems and methods for allocating mapping, localization, planning, control and task execution in a multi-robot environment. Specifically, according to one embodiment of the invention, mapping, positioning, planning and control functions are assigned to one mobile platform (navigator), while task execution functions are assigned to at least one second mobile platform (functional robot).
[0042] The present invention overcomes the shortcomings of conventional systems currently in use by providing near real-time manipulation and task completion. One ideal application of the present invention is in home or office cleaning, which typically involves multiple and repetitive tasks such as vacuuming, sweeping, mopping. However, the invention can also be used in any environment where multiple robots are manipulated to perform assigned tasks.
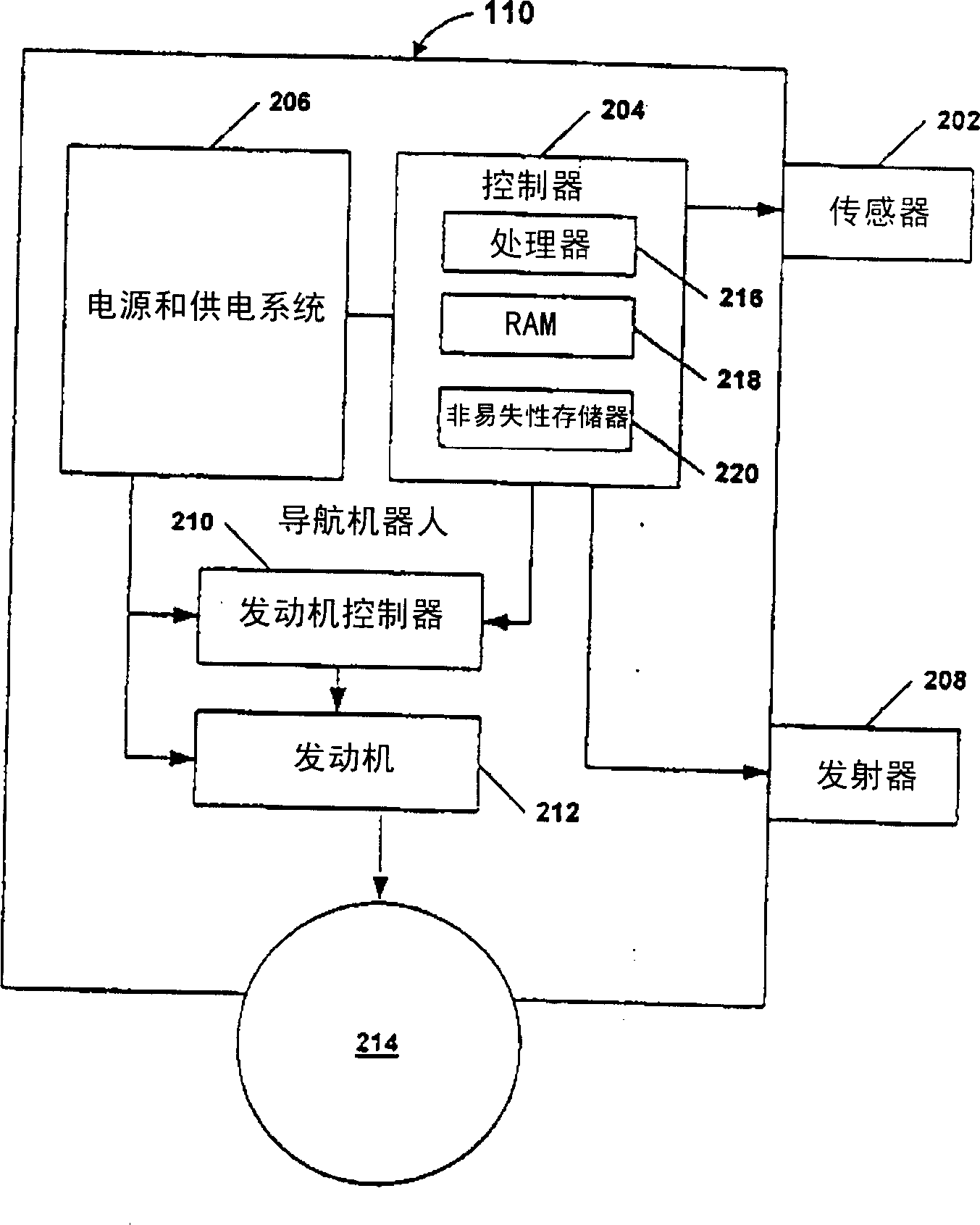
[0043] 2. System components
[0044] figure 1 is a block diagram of a m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More