

Flexible joint of helical spring type artificial muscle
An artificial muscle and coil spring technology, applied in artificial arms, artificial legs, manufacturing tools, etc., can solve the problems of no multi-directional bending, complex structure, high manufacturing cost, and achieve high dynamic control accuracy, small fluid flow, and coordination. good effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below the present invention will further describe the implementation of various modes in conjunction with accompanying drawing:
[0026] (1) Elastic bellows assembly
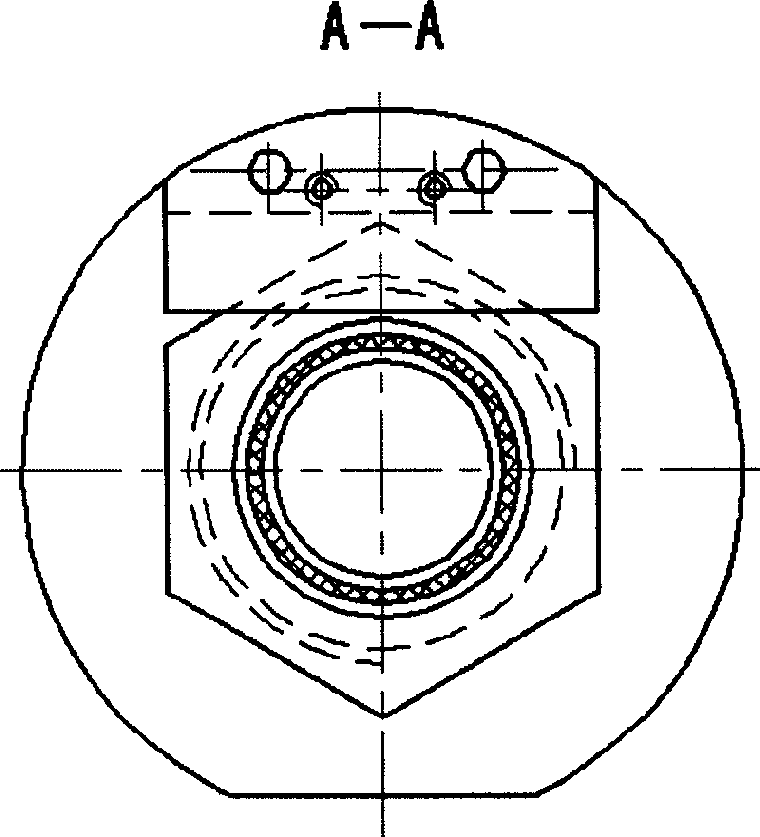
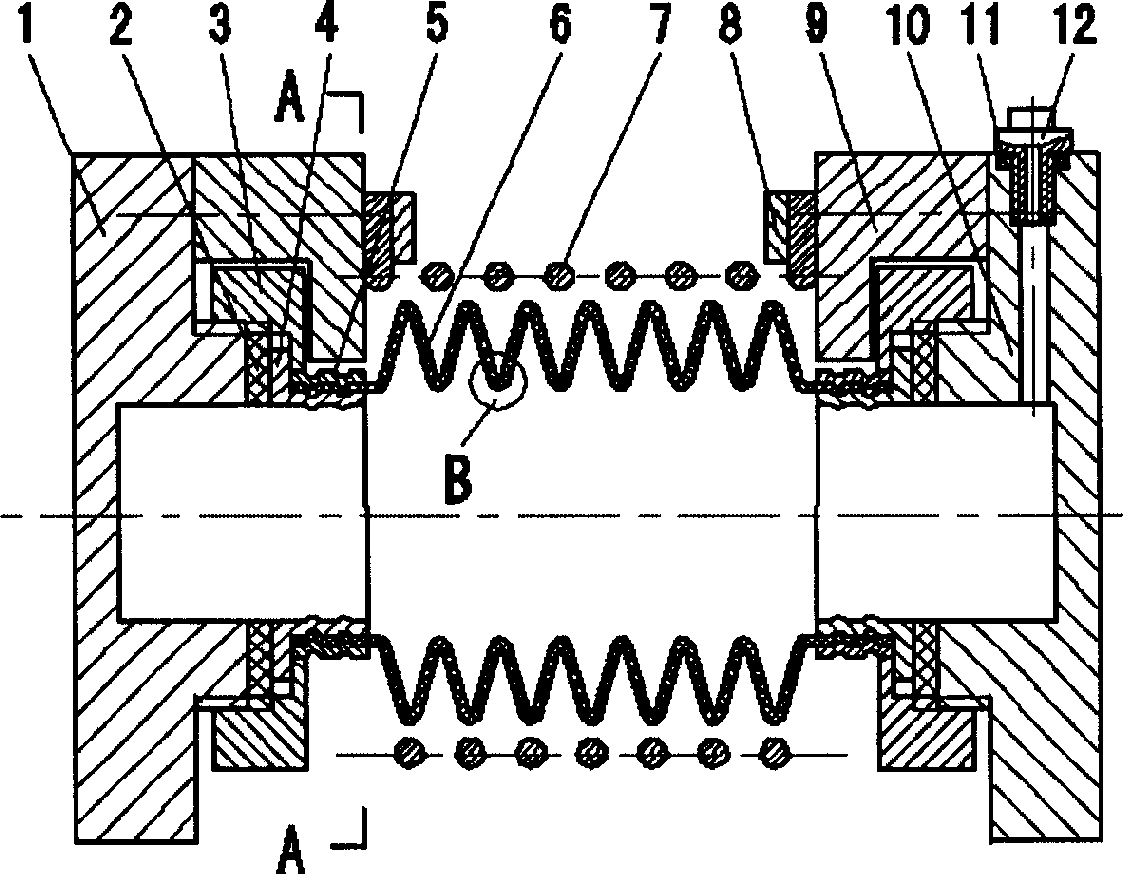
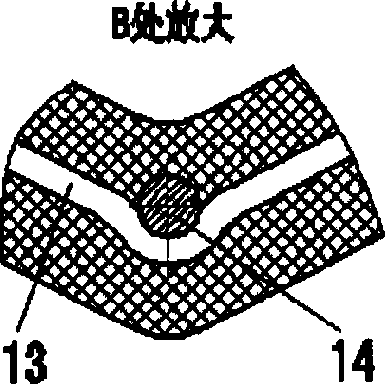
[0027] as attached Figures 1 to 3 As shown, the longitudinal section shape of the single-section elastic bellows 6 of the elastic bellows is in the shape of "V", "U" or "Ω", and its wall contains an annular weft 14 and a flexible ring-shaped weft 14. Warp wire 13; similar to the hydraulic oil delivery rubber hose structure, the elastic bellows assembly is fixed by fastening the shell 5 to roll or mold the elastic bellows 6 in the ring groove of the flange inner sleeve 4, and fasten the shell 5 Connecting nut 3 is sleeved above, and above-mentioned structure has formed elastic bellows assembly.
[0028] (2) Artificial muscle components
[0029] as attached Figures 1 to 3 As shown, the connecting nut 3 of the elastic bellows assembly rotates, drives the flange inner sleeve 4 to press the sealing gaske...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More