

Force collecting device of surgical knife
A collection device, scalpel technology, applied in the direction of surgery, measuring devices, medical science, etc., to achieve the effect of reducing cost and time, facilitating surgery or cutting tests, and reducing calculation work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] Such as figure 1 As shown, a high-precision three-dimensional tracking device is installed on the side of the system, and the precise position of the tracked scalpel and the posture information of the scalpel are measured through a magnetic sensor.
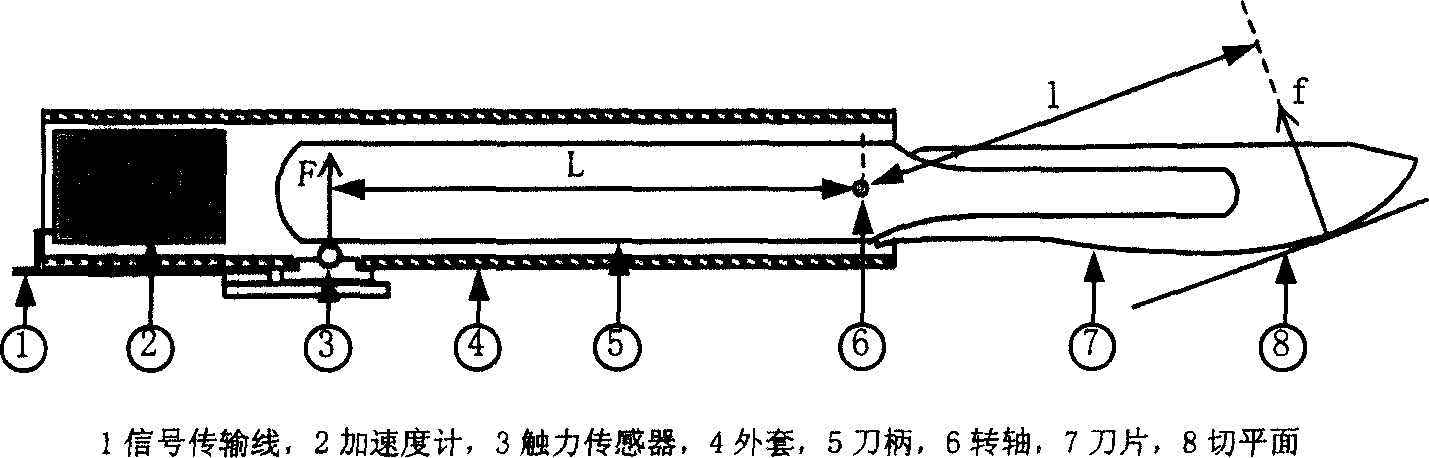
[0020] When using the present invention for surgery or cutting test, such as figure 2 As shown, the scalpel handle 5 is installed in the sleeve 4 through the rotating shaft 6; the scalpel cutting object 8 receives the force f that makes it rotate counterclockwise around the rotating shaft 6, and the rear end of the scalpel handle rotates at a small angle and the contact force The force-bearing ball of the sensor 3 is in contact with it and receives a balance force F that rotates clockwise around the rotating shaft 6. When the scalpel is inclined at different angles, the contact points between the blade and the cutting plane are different, and the force arm l changes accordingly. According to the moment balance principle FL=fl,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More