

Microinertia measuring unit precisive calibration for installation fault angle and rating factor decoupling
A technology of installation error angle and micro-inertial measurement, applied in directions such as navigation through velocity/acceleration measurement, which can solve the problems of inability to accurately calculate the installation error angle, providing guidance information for the installation error angle, asymmetric gyroscope scale factors, etc. Achieve the effect of reducing the test requirements and difficulty, improving the calibration efficiency, and reducing the workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
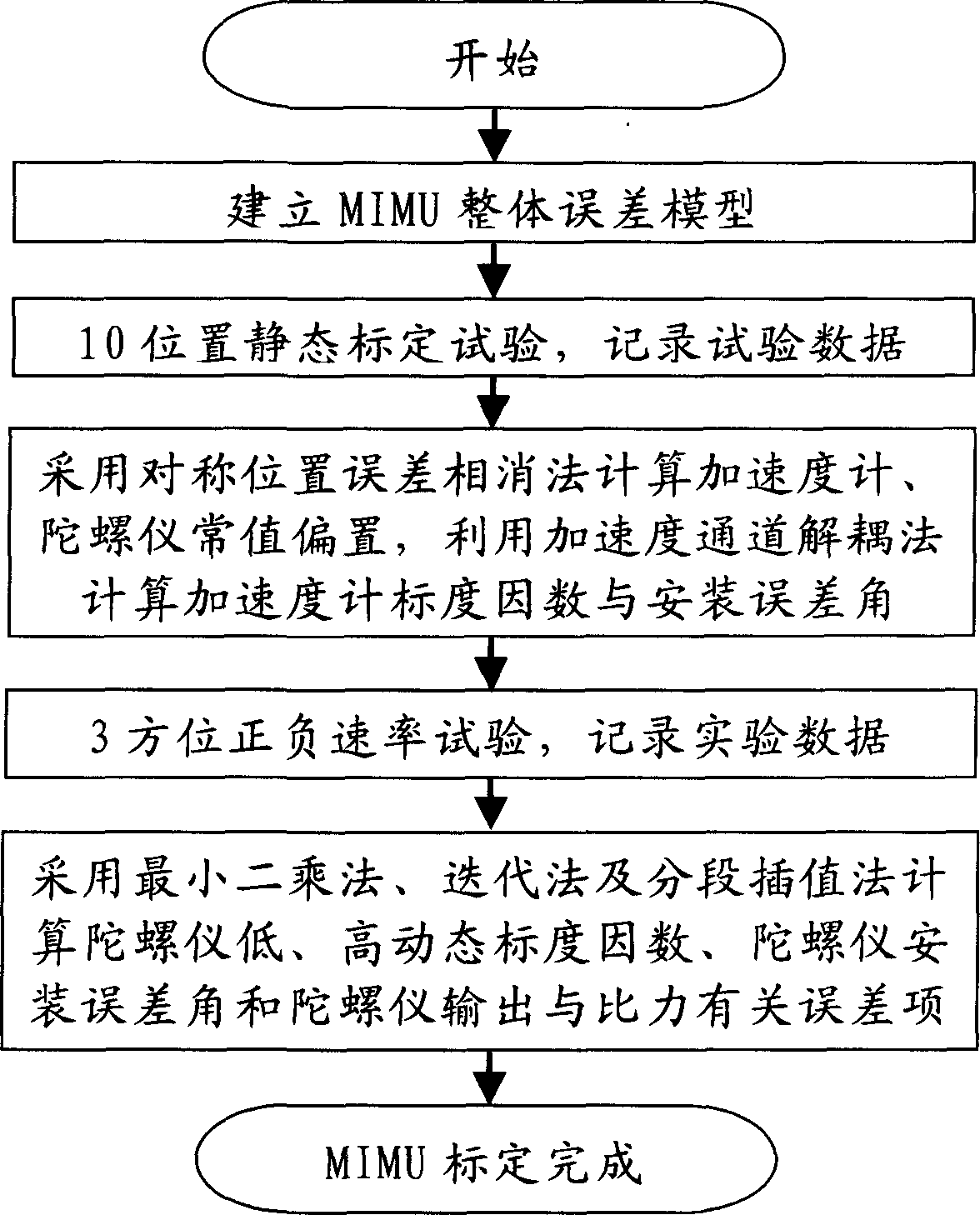
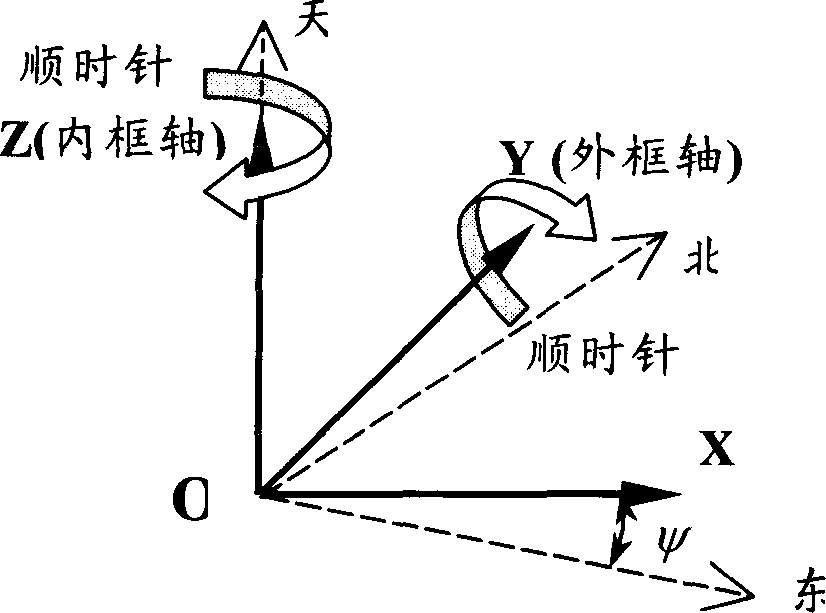
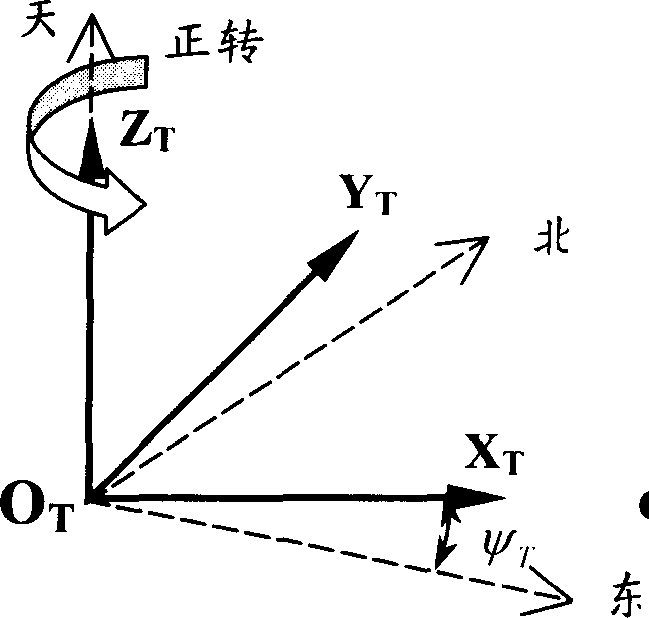
[0034] The specific implementation steps of the technical solution of the present invention are as follows: figure 1 As shown, first define the coordinate systems used in the specific implementation process, figure 2 is the coordinate system OXYZ of the dual-axis position station and the relationship between this coordinate system and the geographic coordinate system Northeast Sky; image 3 is the speed turntable coordinate system O T x T Y T Z T And the relationship between this coordinate system and the geographic coordinate system northeast sky; Figure 4 is the MIMU coordinate system oxyz, the specific implementation steps are as follows:
[0035] 1. Based on the characteristics of MIMU installation error angle, poor resolution, large drift, non-linear scale factor and large asymmetry error, a complete error model of MIMU is established, and the installation error angle is used to replace the installation error in the existing error model coefficient, which separate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More