

Two-feet walking robot having hip joint adopted with two-ball shape gear for 7-freedom legs
A walking robot, degree of freedom technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems that robots are difficult to achieve body balance, lack of flexibility, and increase manufacturing costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
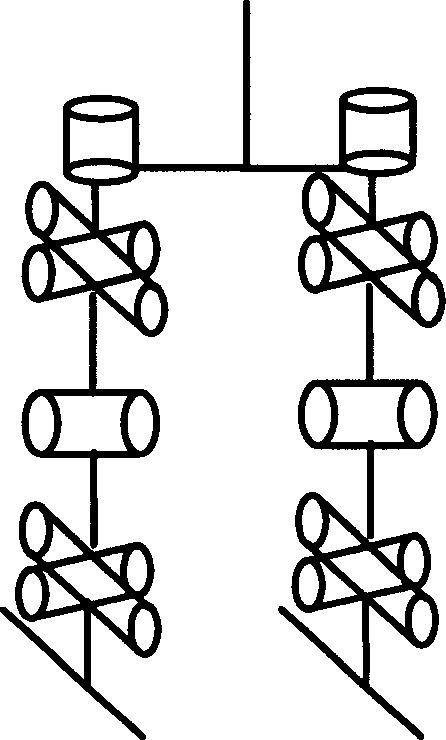
[0020] Robot leg of the present invention is made up of hip joint, knee joint and ankle joint three parts. The hip joint of the robot adopts a double-ball joint, and the leg has 7 degrees of freedom. The double-ball joint is a six-degree-of-freedom mechanism, and its six rotation axes intersect at one point. The hip joint has 3 degrees of freedom, the knee joint has 1 degree of freedom, and the ankle joint uses three degrees of freedom. On the basis of the traditional robot's 2 degrees of freedom ankle joint, the degree of freedom of rotation in the Z direction is added.
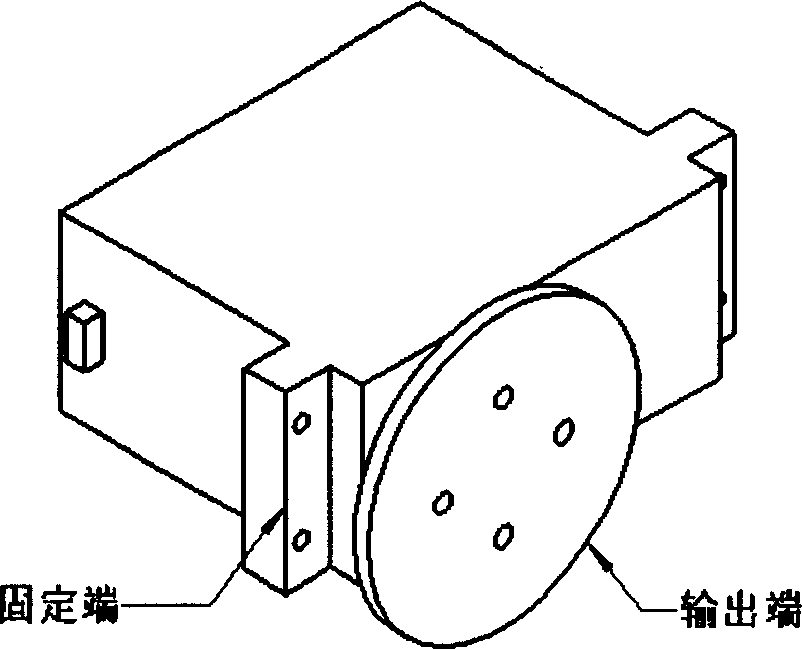
[0021] The motors mentioned in the present invention are all the same type of motors, and its shape and output end and fixed end are as follows: image 3 shown.
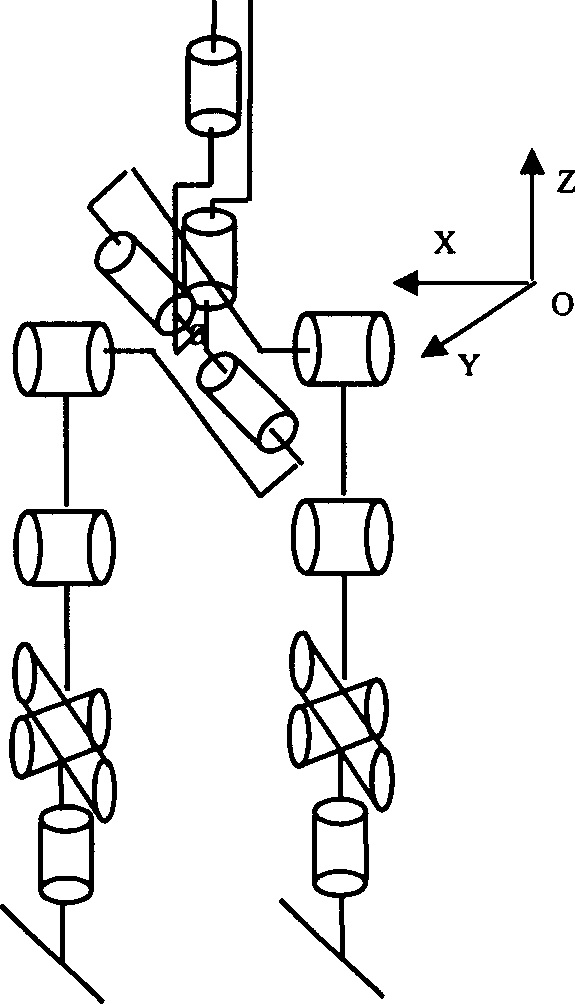
[0022] The lower limb mechanism of humanoid robot with 7-DOF leg is as follows: Figure 4 As shown, the output end of the X-direction motor of its 6-degree-of-freedom double-ball hip joint (6) is connected with the left and right two groups of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More