

System and process for identifying objects and/or points nearby a given object or point
a technology of objects and processes, applied in traffic control systems, navigation instruments, instruments, etc., can solve the problems of long time-consuming and laborious, and high cost of htm functions, etc., to achieve the effect of convenient fast search
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In the following description of the preferred embodiments of the present invention, reference is made to the accompanying drawings which form a part hereof, and in which is shown by way of illustration specific embodiments in which the invention may be practiced. It is understood that other embodiments may be utilized and structural changes may be made without departing from the scope of the present invention.
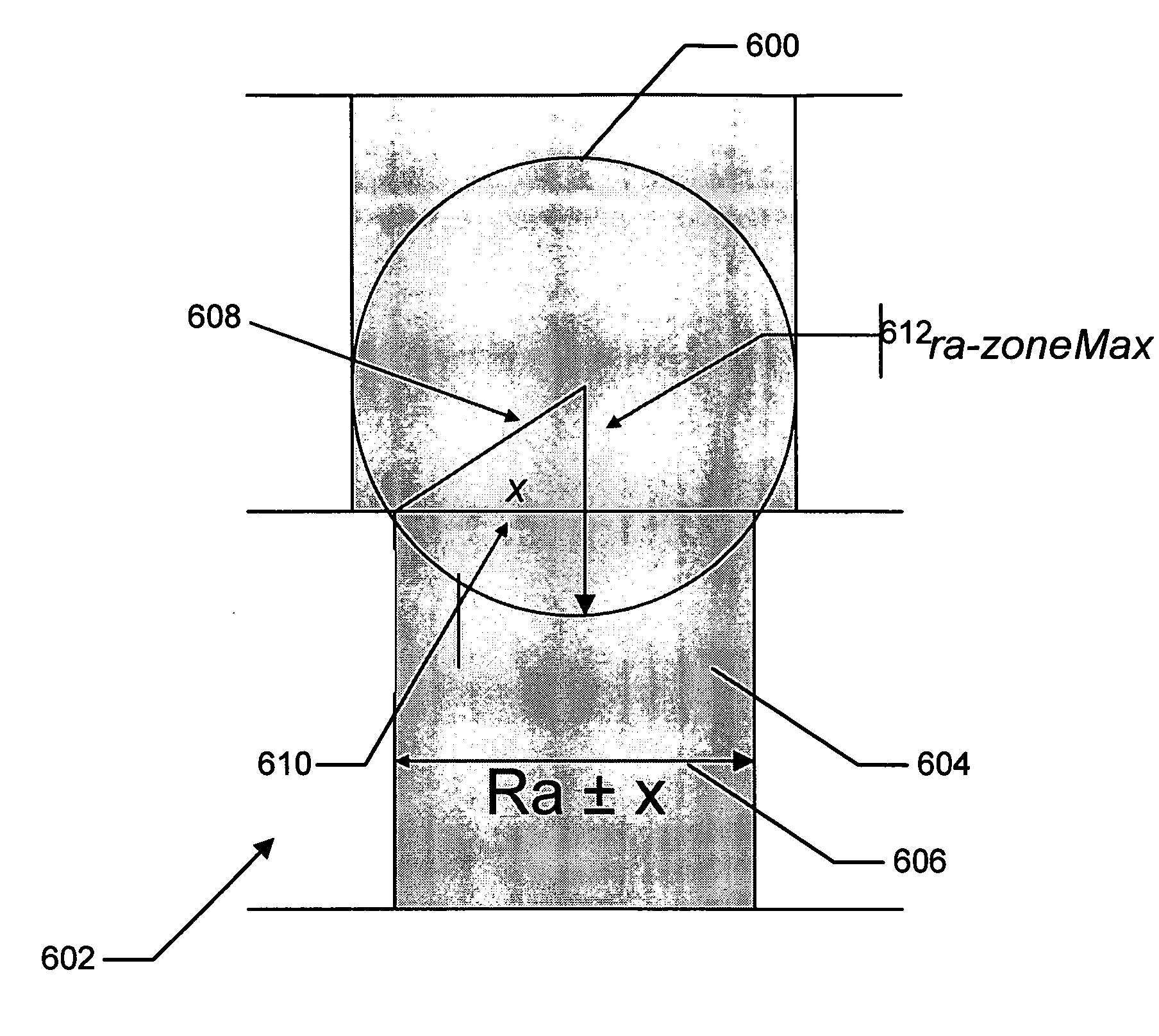
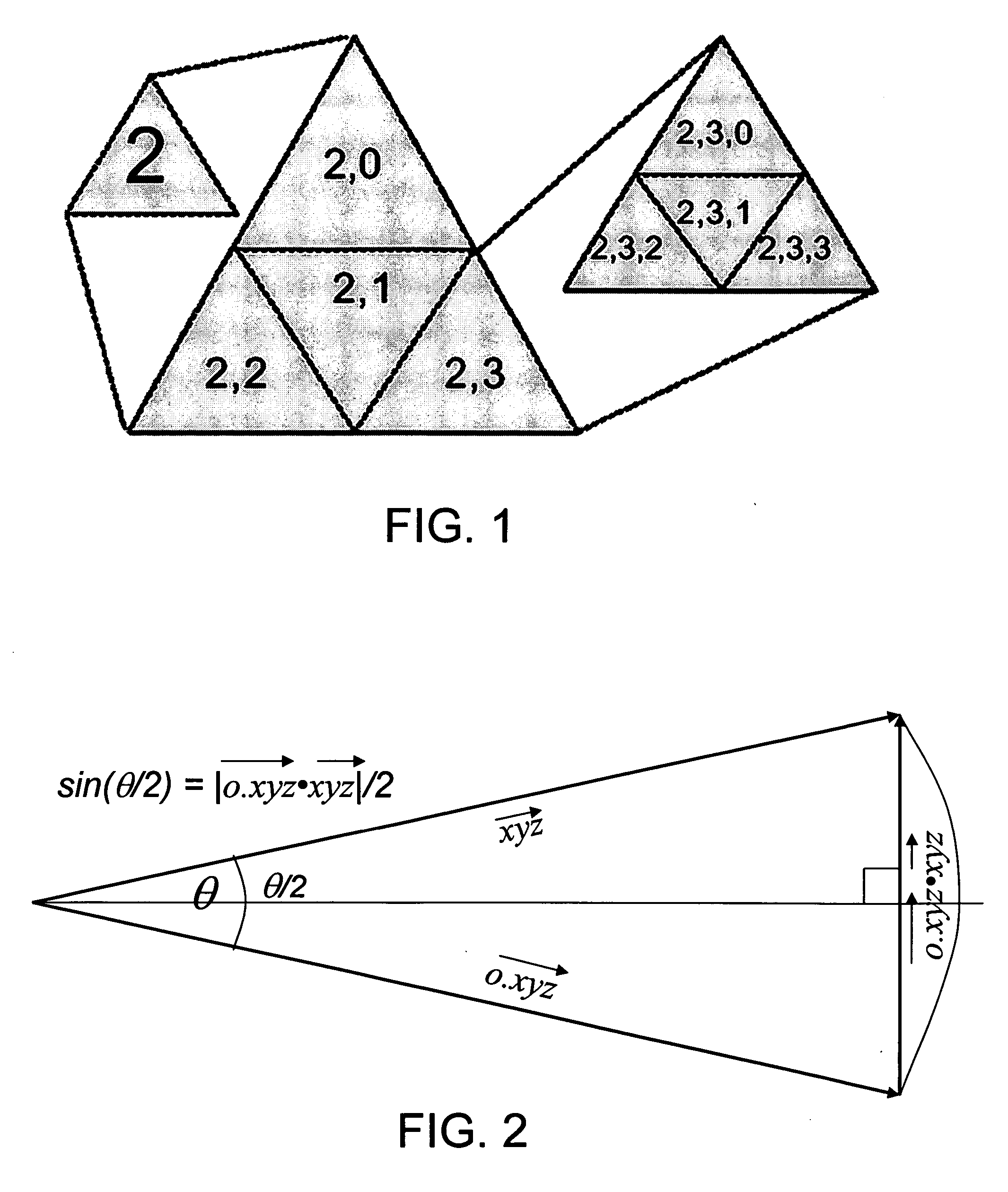
[0051] In general, the system and process according to one embodiment of the present invention identifies all nearby neighbor objects and / or points in relation to a user-specified base point based on information accessed from a database which includes a set of parameters for each object and point. More particularly, this entails first identifying a range of a first pre-selected one of the set of parameters into which that parameter of each of the objects and / or points in the database falls, and then dividing the database into a plurality of zones each forming an equal s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More