

Processing method and processing device
a processing method and processing device technology, applied in manipulators, gripping heads, metabolism disorders, etc., can solve the problems of inability to clamp body parts on the inside, limited access to components of external welding robots or the like, etc., and achieve the effect of better machining techniques
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
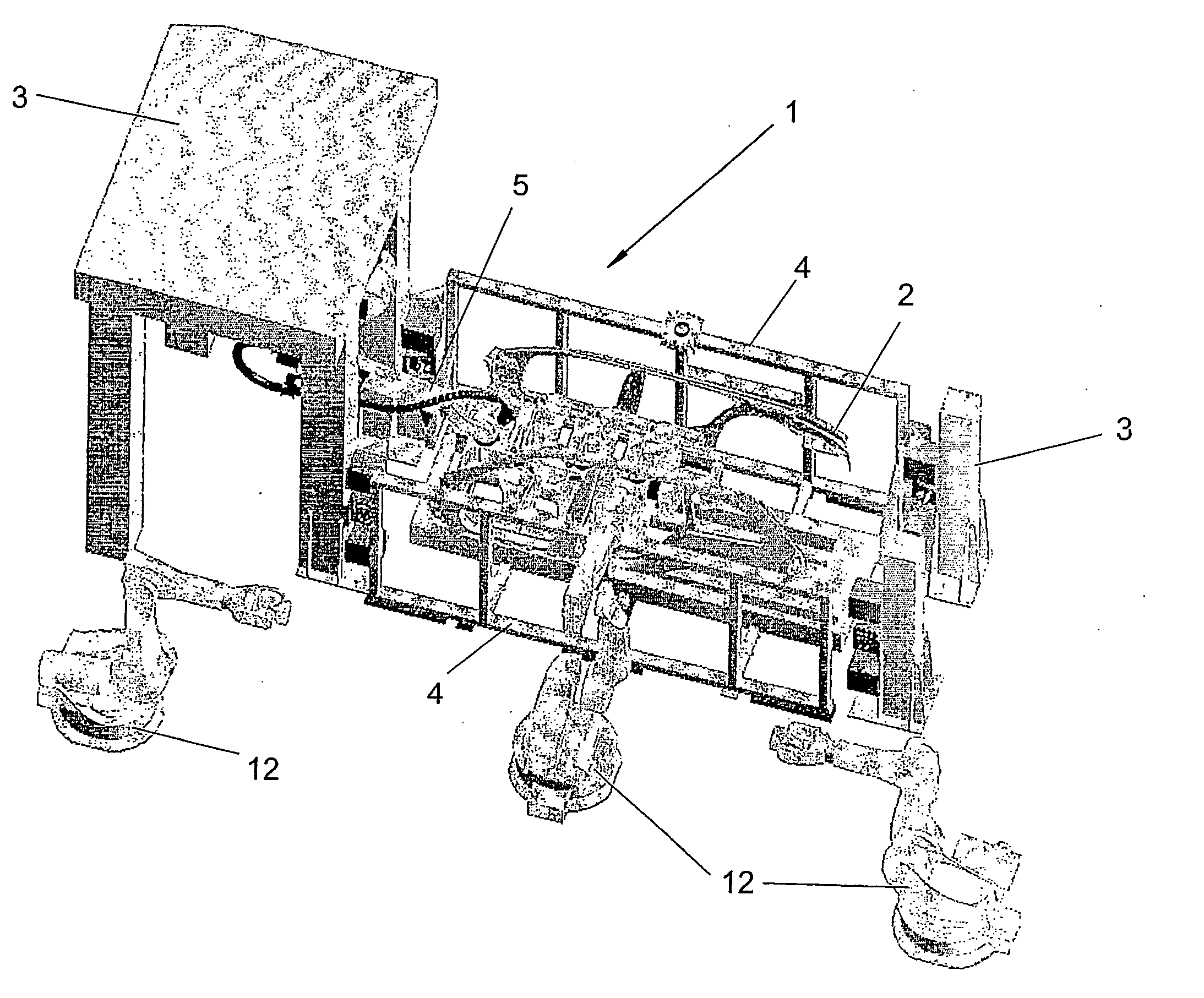
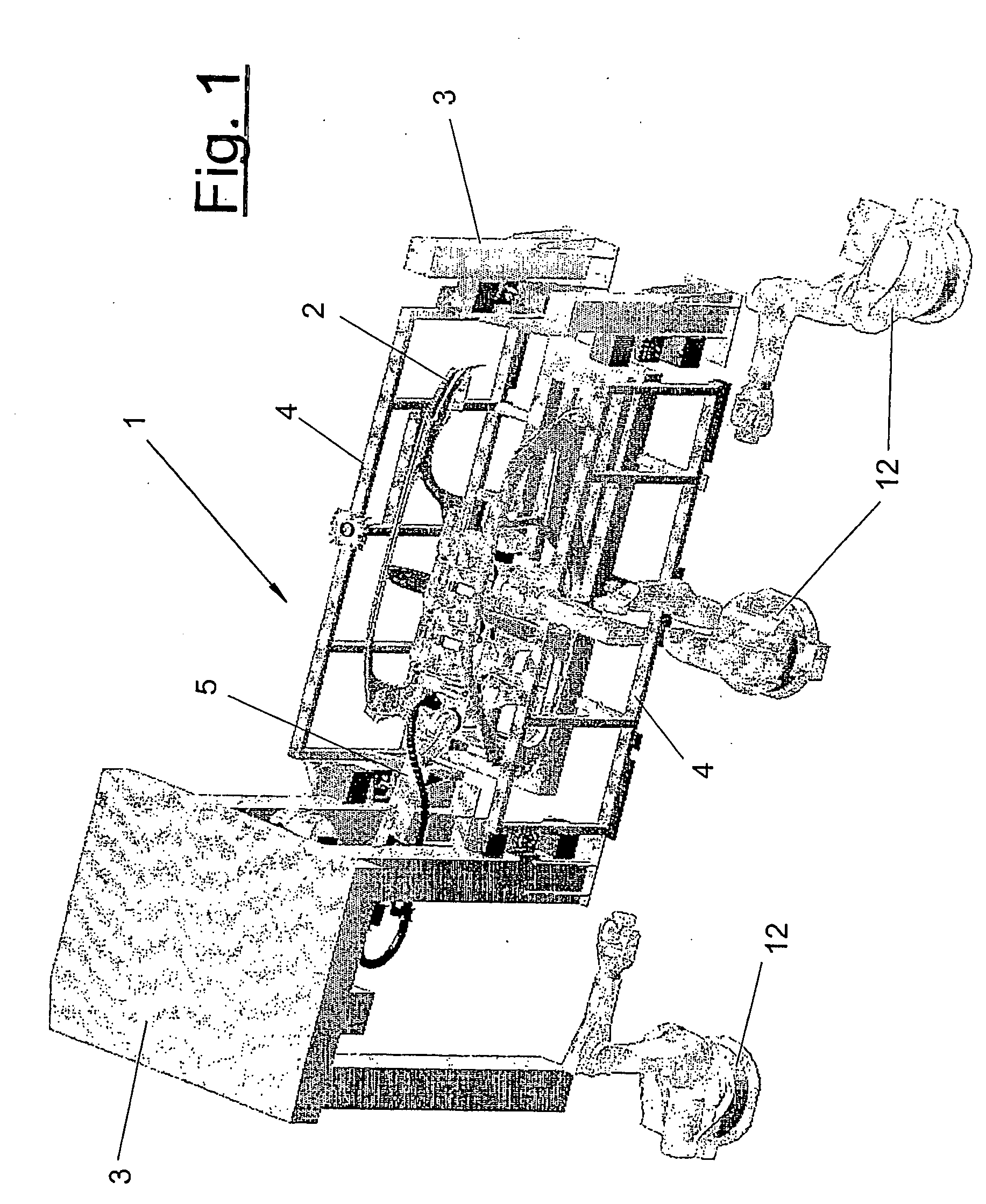
[0021] Referring to the drawings in particular, FIG. 1 shows a machining station (1) for components (2), which station may have any desired suitable design. In the exemplary embodiment being shown, it is a geo station or framing station for body parts (2), for example, side panels and floor group, which are brought into the machining station (1) on a pallet or another suitable carrier by means of a conveyor, not shown, and positioned here exactly in a position suitable for machining. The machining station (1) may be part of a larger production plant and integrated in this case within a transfer line formed by a plurality of stations.
[0022] One or more external clamping frames (4), for example, the two side frames shown in FIG. 1, which are docked with the station frame (3) or alternatively with the pallet in a suitable and accurately positioned manner, may be present in the machining station (1) for clamping the body parts (2).
[0023] A plurality of machining devices (5, 12) are pr...
PUM
| Property | Measurement | Unit |
|---|---|---|
| height | aaaaa | aaaaa |
| shape | aaaaa | aaaaa |
| flexible | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More