

Divergence ratio distance mapping camera
a technology of distance mapping and divergence ratio, which is applied in the field of three-dimensional information detection and mapping methods, can solve the problems of limited triangulation methods, limited time of flight methods, and inability to provide real-time operation of television cameras, and achieve the effect of minimizing the effect of light source shadowing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
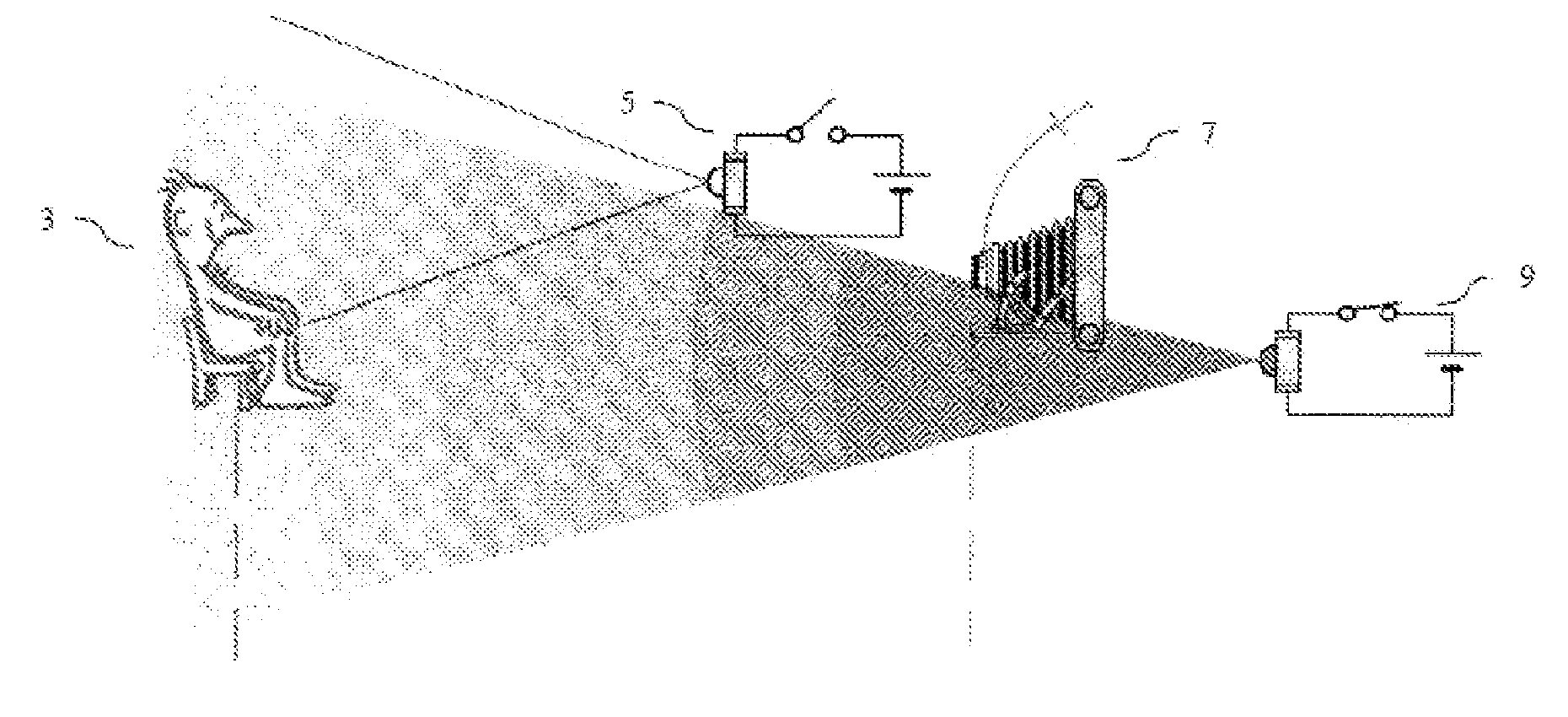
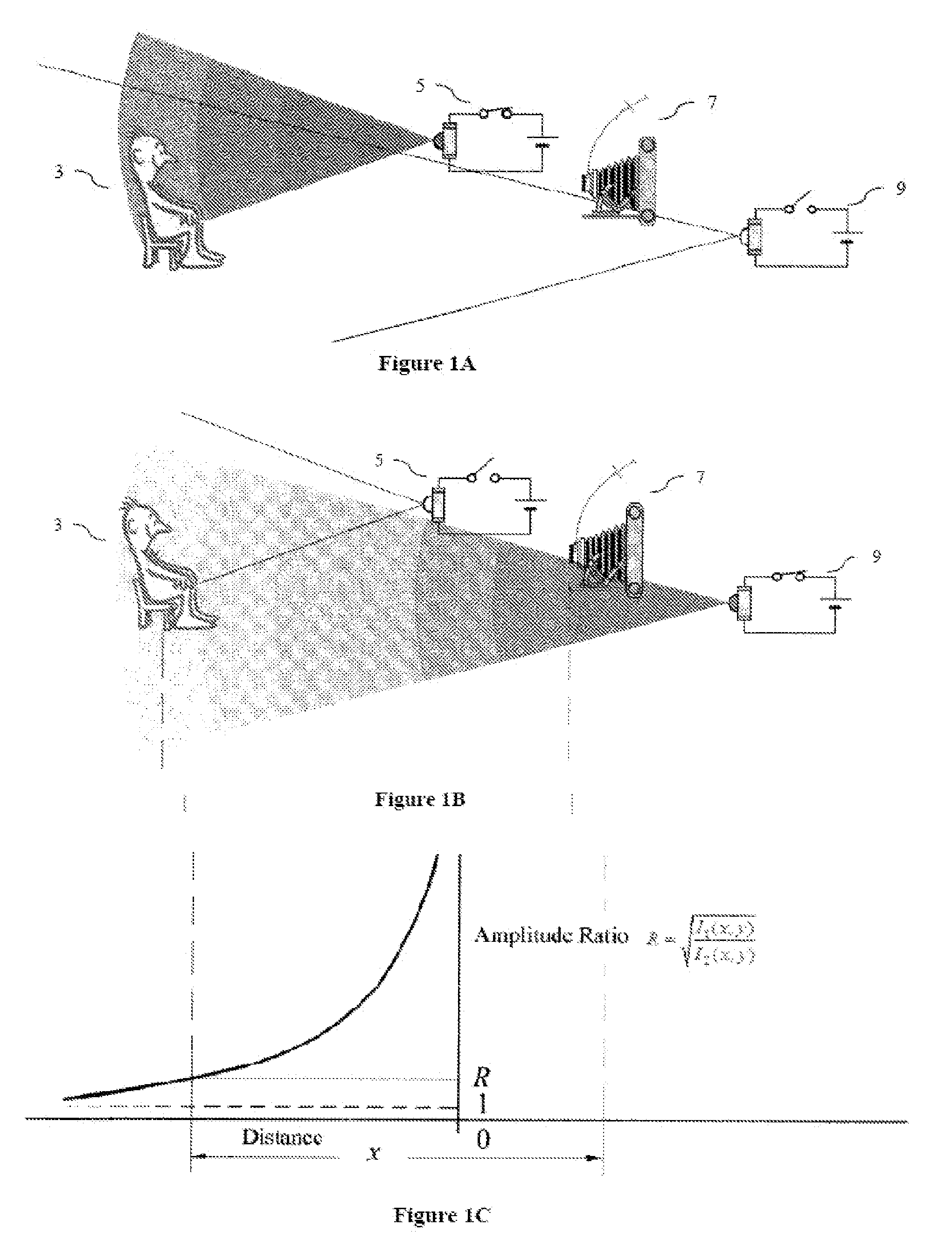
[0029]FIG. 1a illustrates the distance mapping apparatus 1 capturing an image I1 of a target object 3 using a first illuminating device 5 as a light source. The first illuminating device 5 illuminates the target object 3 and the camera device 7 captures an image I1 that is stored by the system (see FIG. 6).
[0030]FIG. 1b illustrates the distance mapping apparatus 1 capturing an image I2 of a target object 3 using a second illuminating device 9 as a light source. The second illuminating device 9 illuminates the target object 3 and the camera device 7 captures an image I2 that is stored by the system (see FIG. 6).
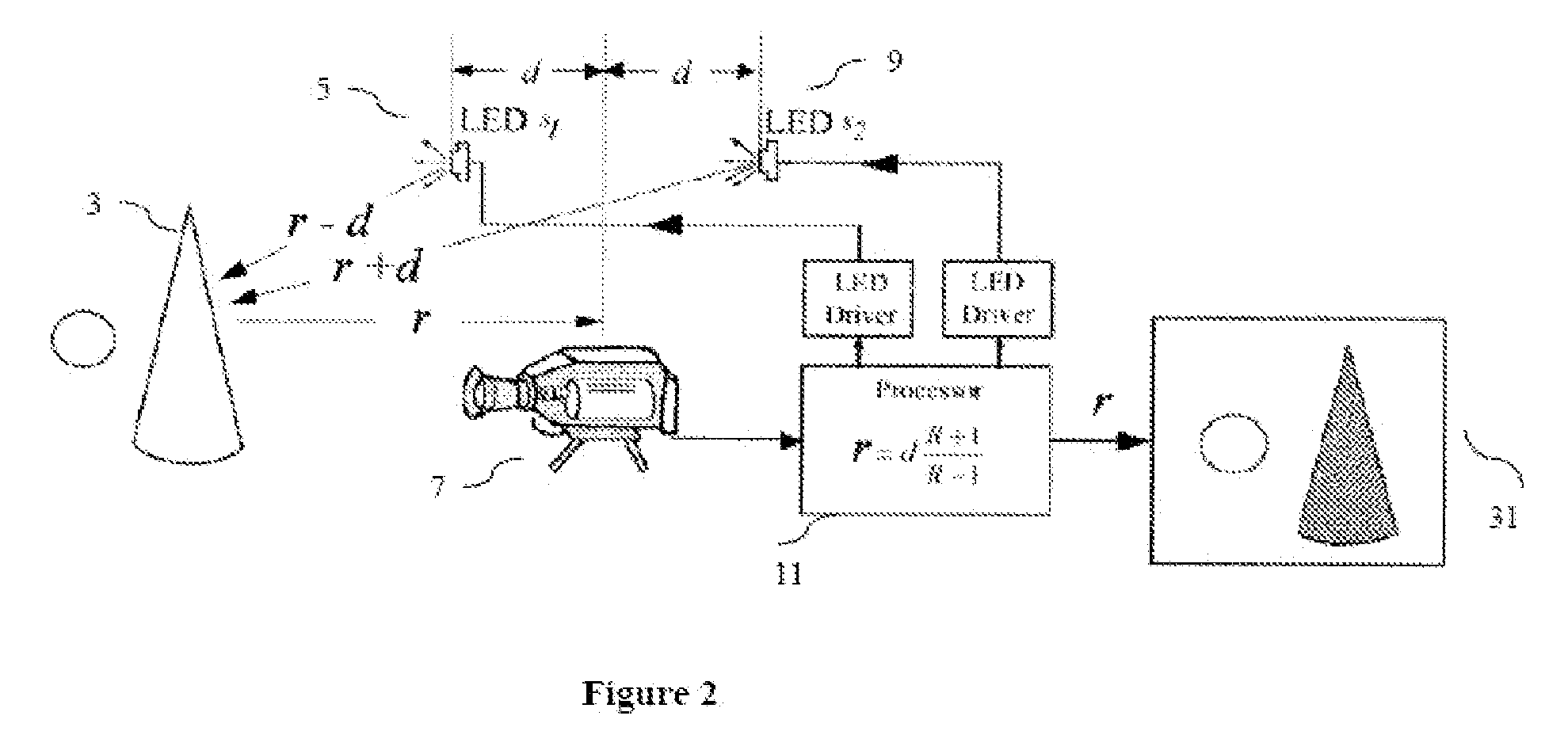
[0031]FIG. 1c illustrates the amplitude ratio between I1 and I2. As further explained (see FIG. 2), through the derivation of the equation to calculate distance, the present invention functions by comparing the relative image intensities between I1 and I2 on a pixel by pixel basis. FIG. 1c demonstrates a graph wherein the relative image intensities between I1 and I2 have been ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| distance | aaaaa | aaaaa |
| light intensity | aaaaa | aaaaa |
| distances | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More