Power steering apparatus of watercraft with propeller
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
embodiment 1 (figs.1 to 4c)
Embodiment 1 (FIGS. 1 to 4C)
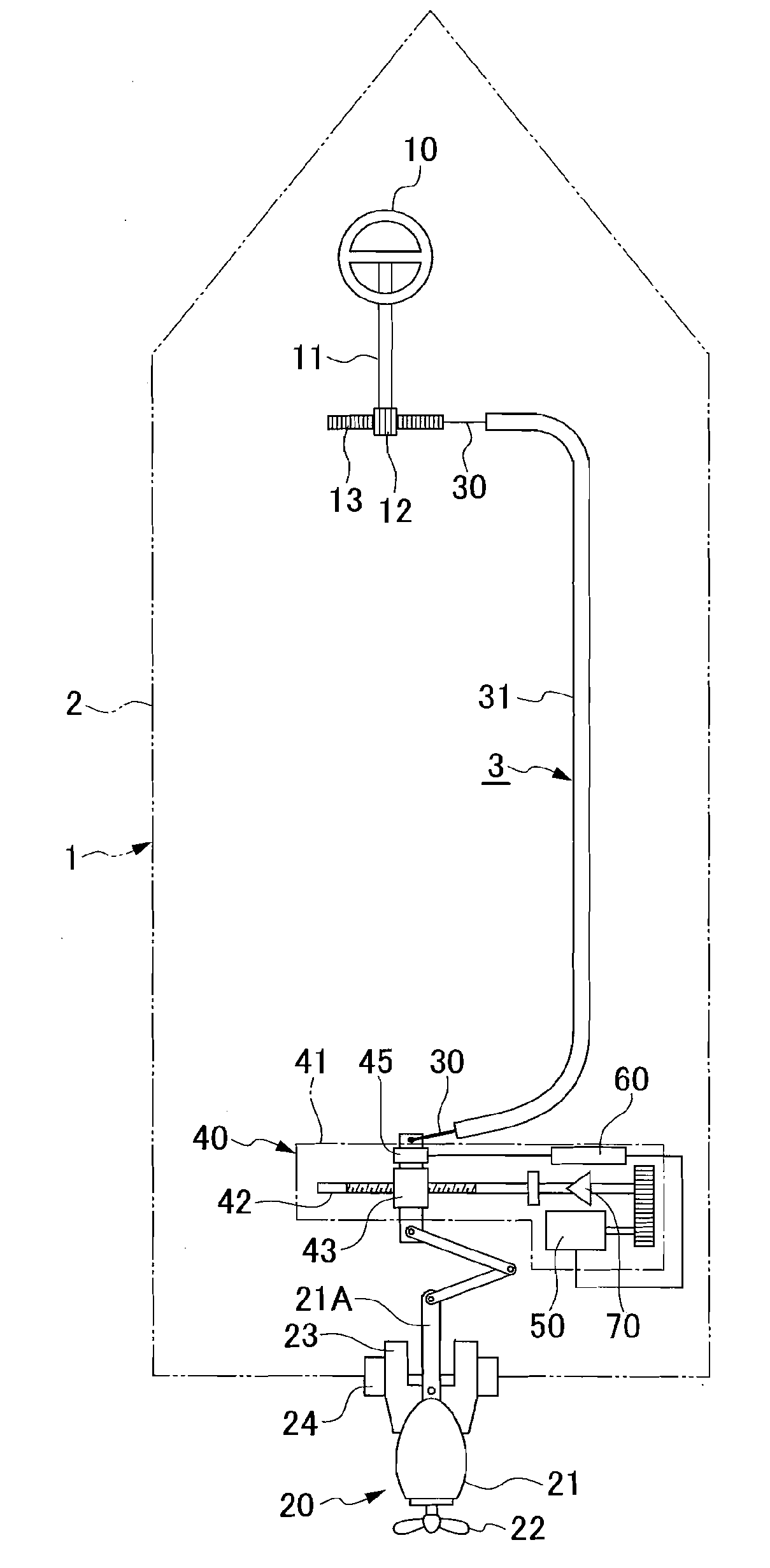
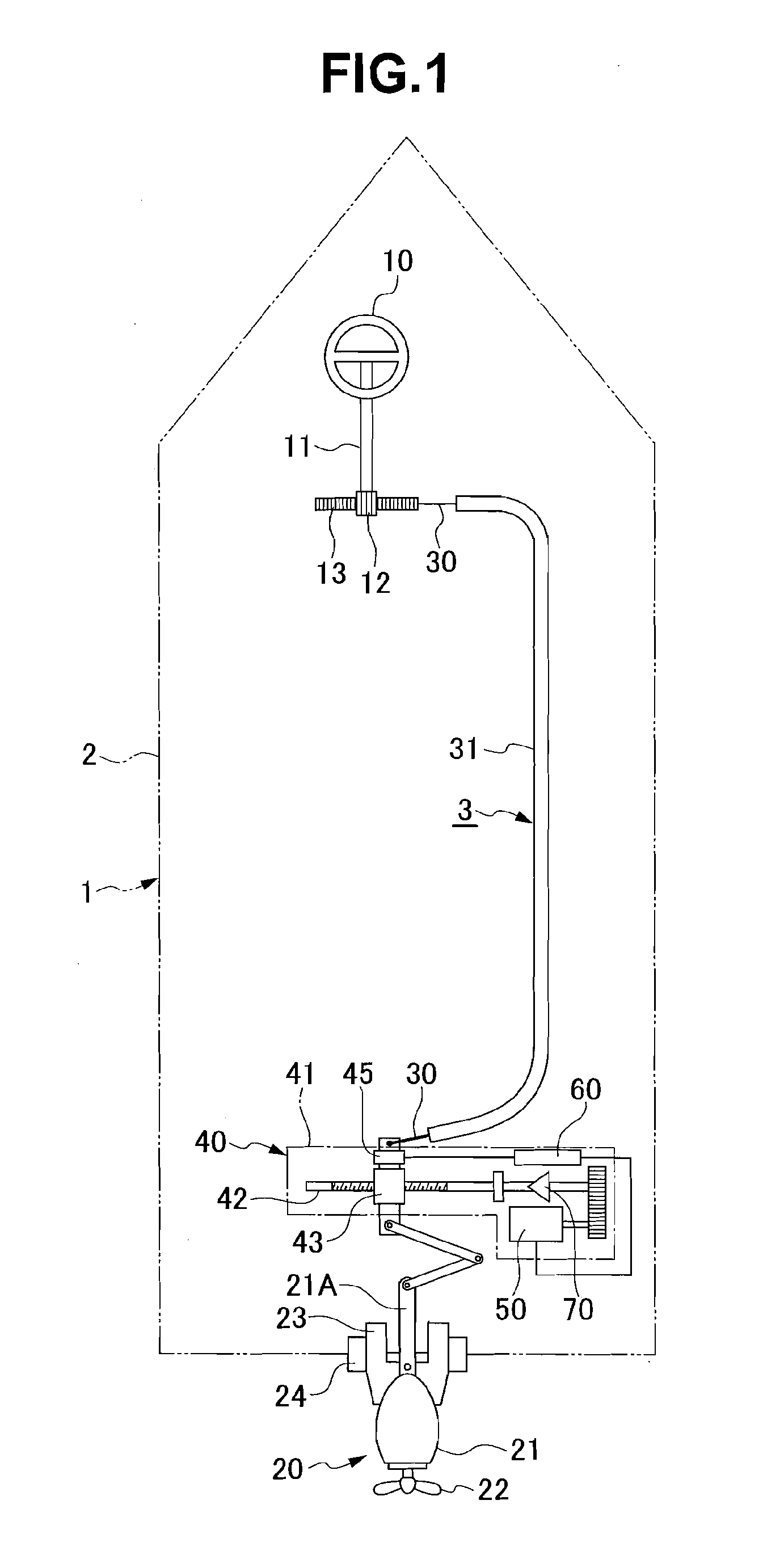
[0027]A watercraft 1 shown in FIG. 1 has a steering handle 10 provided in a bow end of a hull 2, an outboard motor 20 serving as a propeller provided in a stern end of the hull 2, and a steering cable 30 serving as a steering force transmission path transmitting a steering force applied to the steering handle 10 to the outboard motor 20. The steering cable 30 is extended within an outer tube 31 installed in the stern end from the bow end in an inner portion of the hull 2.
[0028]The steering handle 10 is installed in a control seat in the bow end of the hull 2. A pinion 12 fixed to a handle shaft 11 of the steering handle 10 is engaged with a rack 13, and the rack 13 is coupled to one end of the steering cable 30. The steering handle 10 is rotated leftward or rightward on the basis of an application of a steering force (a steering torque), whereby the steering cable 30 is pushed and pulled via an engagement between the pinion 12 and the rack 13.
[0029]The ou...
embodiment 2 (figs.5 and 6)
Embodiment 2 (FIGS. 5 and 6)
[0047]A difference between a power steering apparatus 3 of a watercraft 1 in accordance with an embodiment 2 shown in FIGS. 5 and 6 and the embodiment 1 is that the torque sensor 45 and the control unit 60 arranged within the gear case 41 of the steering assist apparatus 40 are moved.
[0048]The torque sensor 45 is provided on the handle shaft 11 of the steering handle 10. In other words, the handle shaft 11 is structured such that an input shaft 11A to which the steering handle 10 is directly coupled, is coaxially coupled to an output shaft 11B to which the pinion 12 is directly coupled, via a torsion bar (not shown), and the torque sensor 45 is interposed between the input shaft 11A and the output shaft 11B. Accordingly, the torque sensor 45 is structured such as to detect the steering direction and the steering torque applied by the watercraft steering person to the steering handle 10.
[0049]The control unit 60 is arranged on one side of the steering hand...
embodiment 3 (fig.7)
Embodiment 3 (FIG. 7)
[0051]A difference between a power steering apparatus 3 of a watercraft 1 in accordance with an embodiment 3 shown in FIG. 7 and the embodiment 1 is that a steering assist apparatus 90 taking the place of the steering assist apparatus 40 is arranged around the steering handle 10 in the bow end in the inner portion of the hull 2.
[0052]The steering assist apparatus 90 is arranged within a gear case 91 fixed to the hull 2. The steering assist apparatus 90 is structured such that the handle shaft 11 of the steering handle 10 is separated into two sections including the input shaft 11A to which the steering handle 10 is directly couple, and the output shaft 11B to which the pinion 12 is directly coupled, the input shaft 11A and the output shaft 11B are coaxially coupled via a torsion bar (not shown), and a torque sensor 92 is interposed between the input shaft 11A and the output shaft 11B. The torque sensor 92 detects the steering direction and the steering torque ap...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More