

Proxy Robots and Remote Environment Simulator for Their Human Handlers
a robot and remote environment technology, applied in the field of robots, can solve the problems of not being very stable, the method and apparatus employed, and the design of the treadmill is not very stable, so as to achieve the effect of adding stability and adding stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084]A description of the preferred embodiments with reference to the figures is here presented.
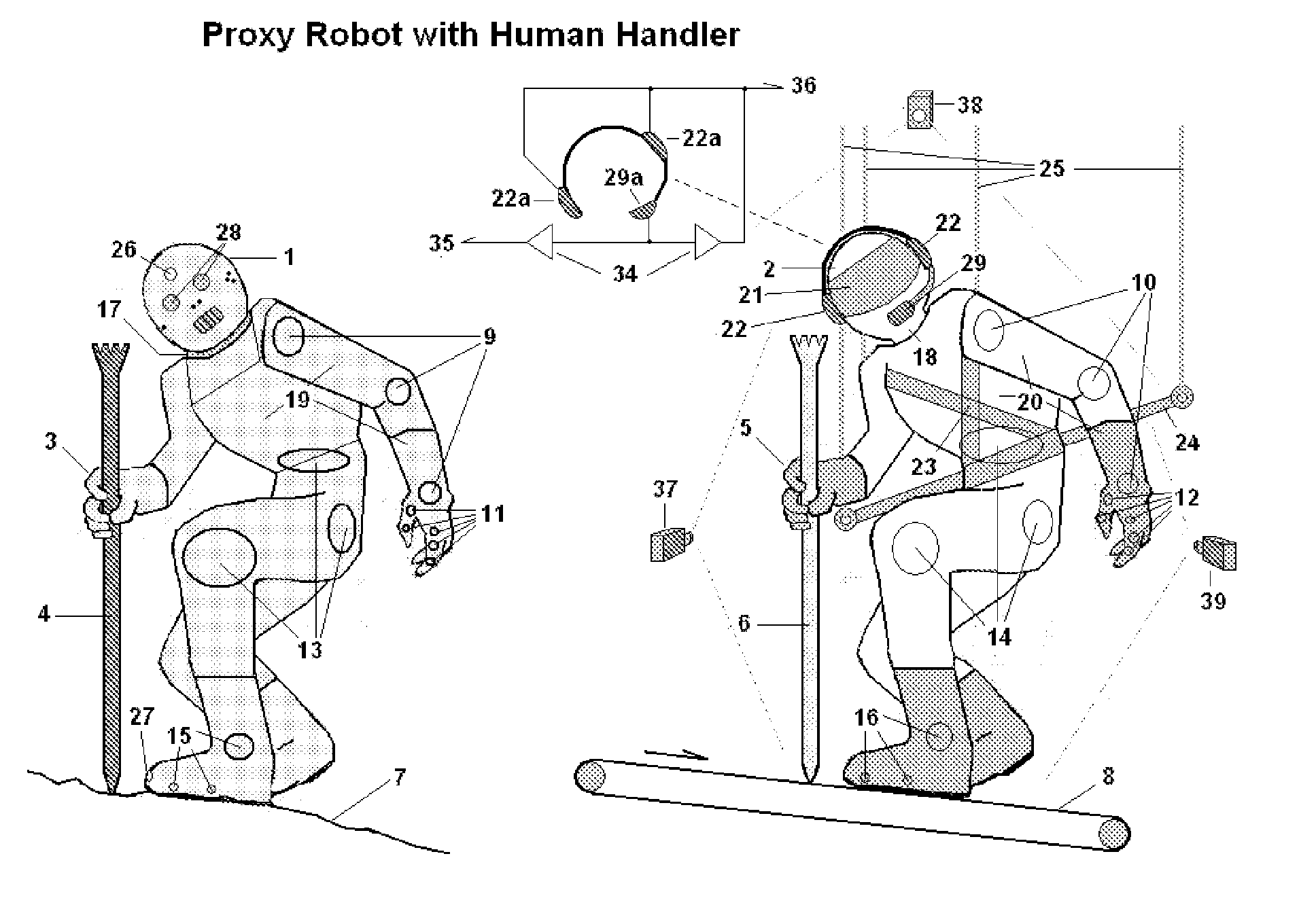
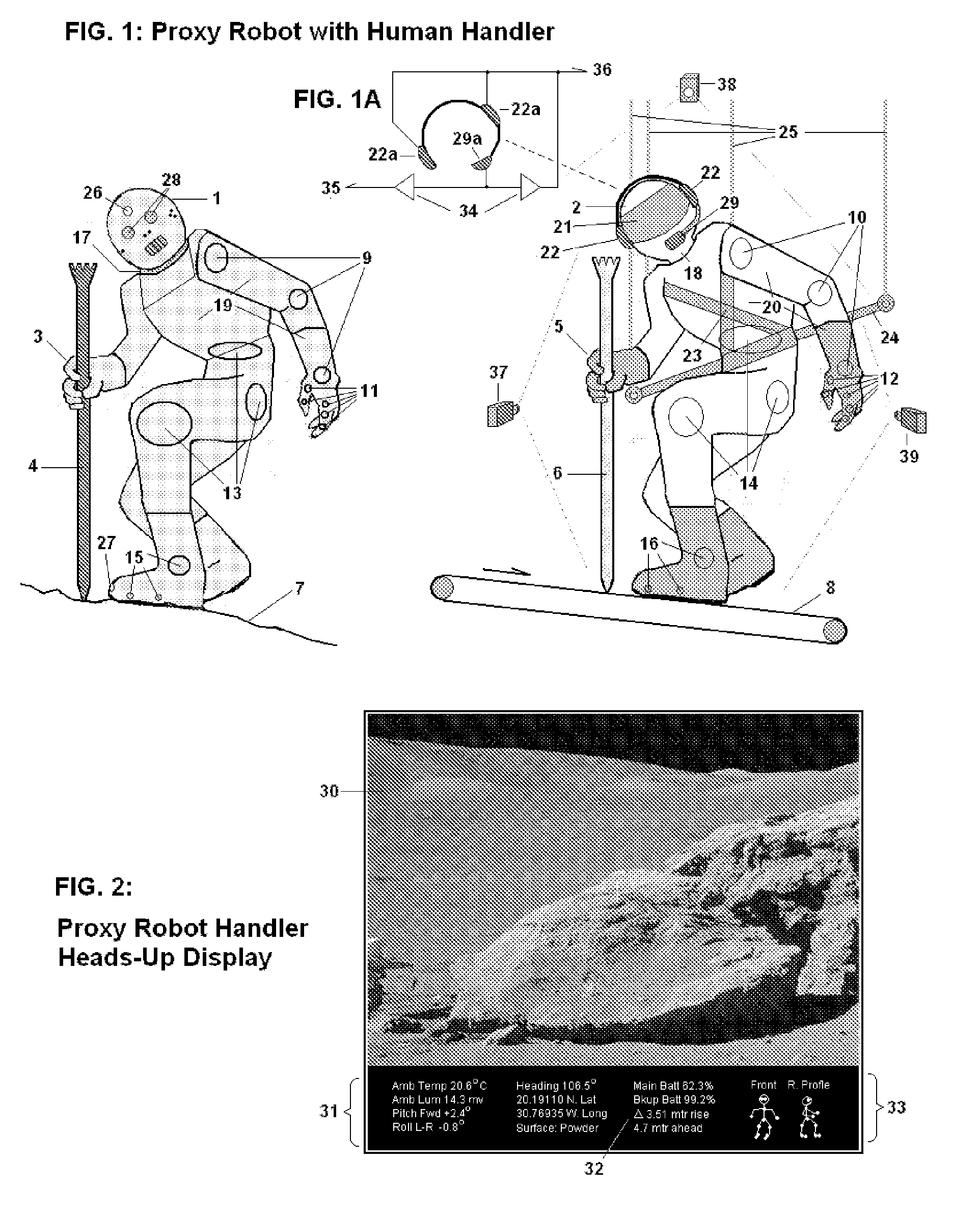
[0085]Referring to FIG. 1, a proxy robot surrogate 1 is depicted and its human handler 2. Note that the body position of both handler and proxy robot is the same, with the proxy following all the handler's moves. For example, in the handler's right hand 5 is a bar tool 6 for breaking and prying rocks; but more correctly the handler is holding a replica bar tool, probably made from plastic, composite or wood to simulate the weight of such a tool on the moon or at some other location in space. This and other replica mission tools would be stored in an area of easy access.
[0086]Proxy robot 1 is also holding a bar tool 4 in its right hand 3, but in this case the tool is real, made from steel or a similar substance capable of performing real work. Note as well that the robot is being made to walk up a slight hill 7, the incline of which is duplicated by mechanisms controlling a treadmill 8, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More