

Method and system for controlling gait of robot
a technology of wearable robots and gaits, applied in the field of wearable robots, can solve the problems of difficult to precisely determine the intended gait of wearers, difficult to actively and variably control robots, and high sensor costs, so as to reduce production costs, reduce load, and wear comfortable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030]Hereinafter, a method and system for controlling the gait of a robot according to a preferred embodiment of the present disclosure will be described in detail with reference to the attached drawings.
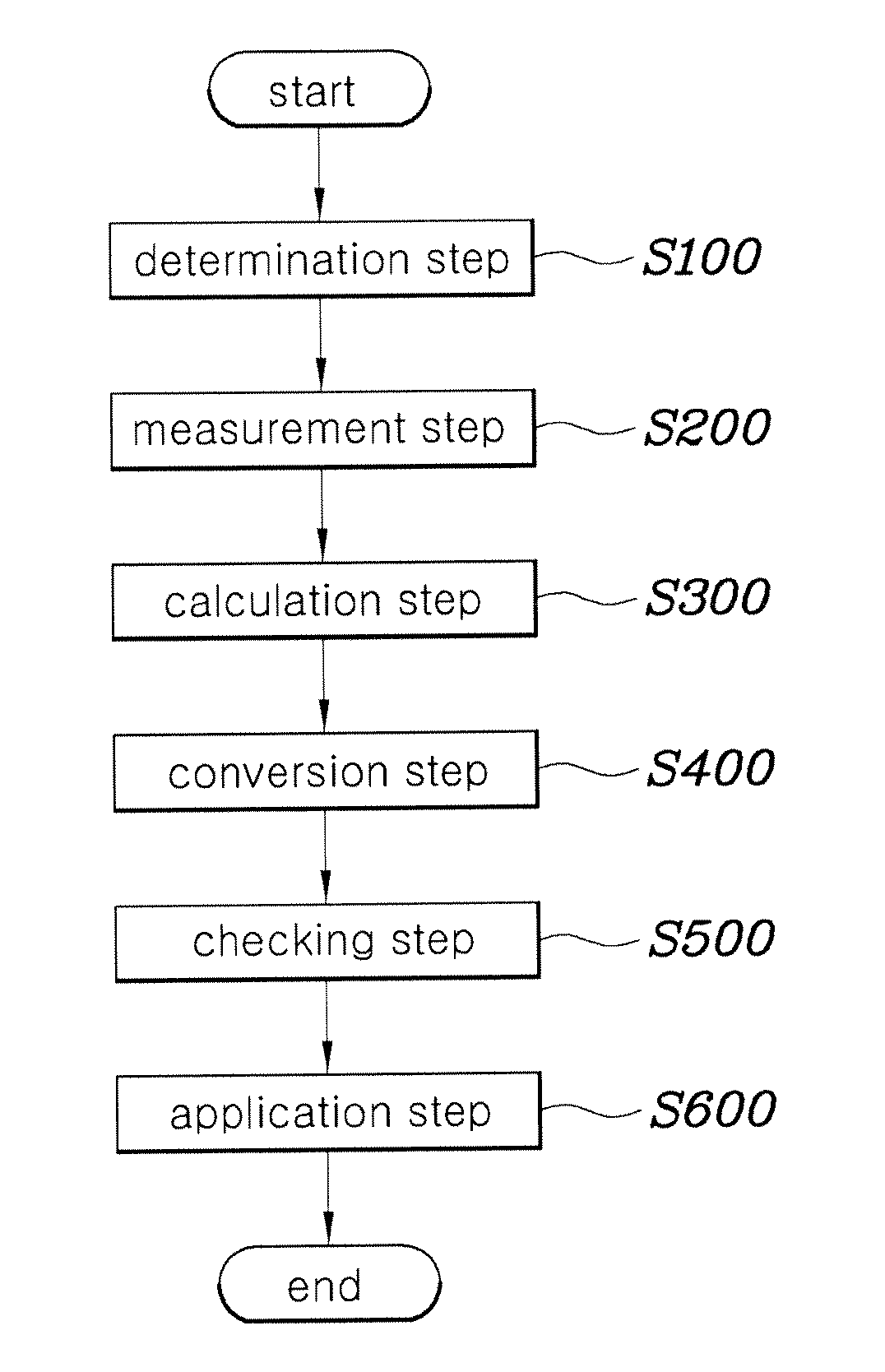
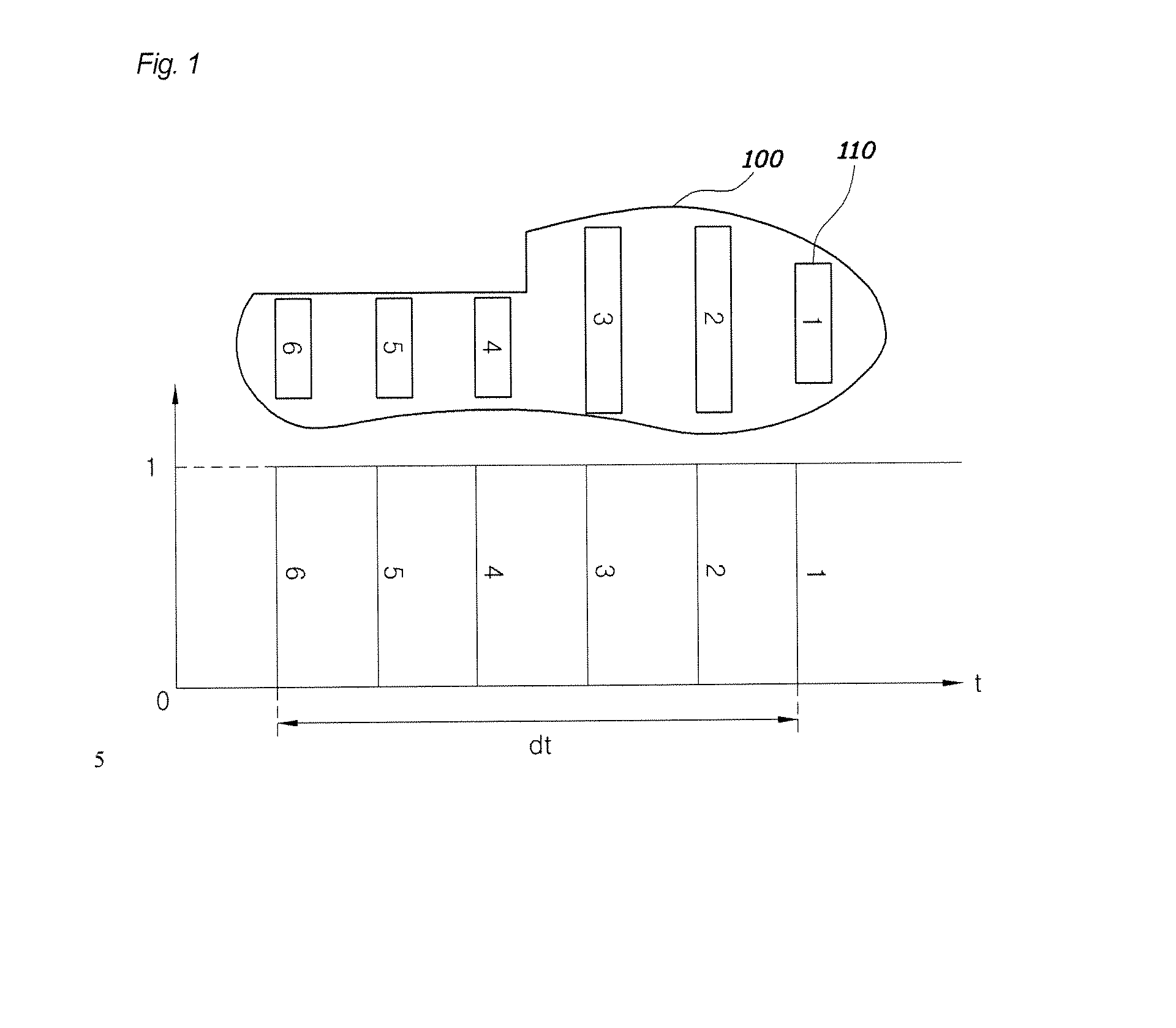
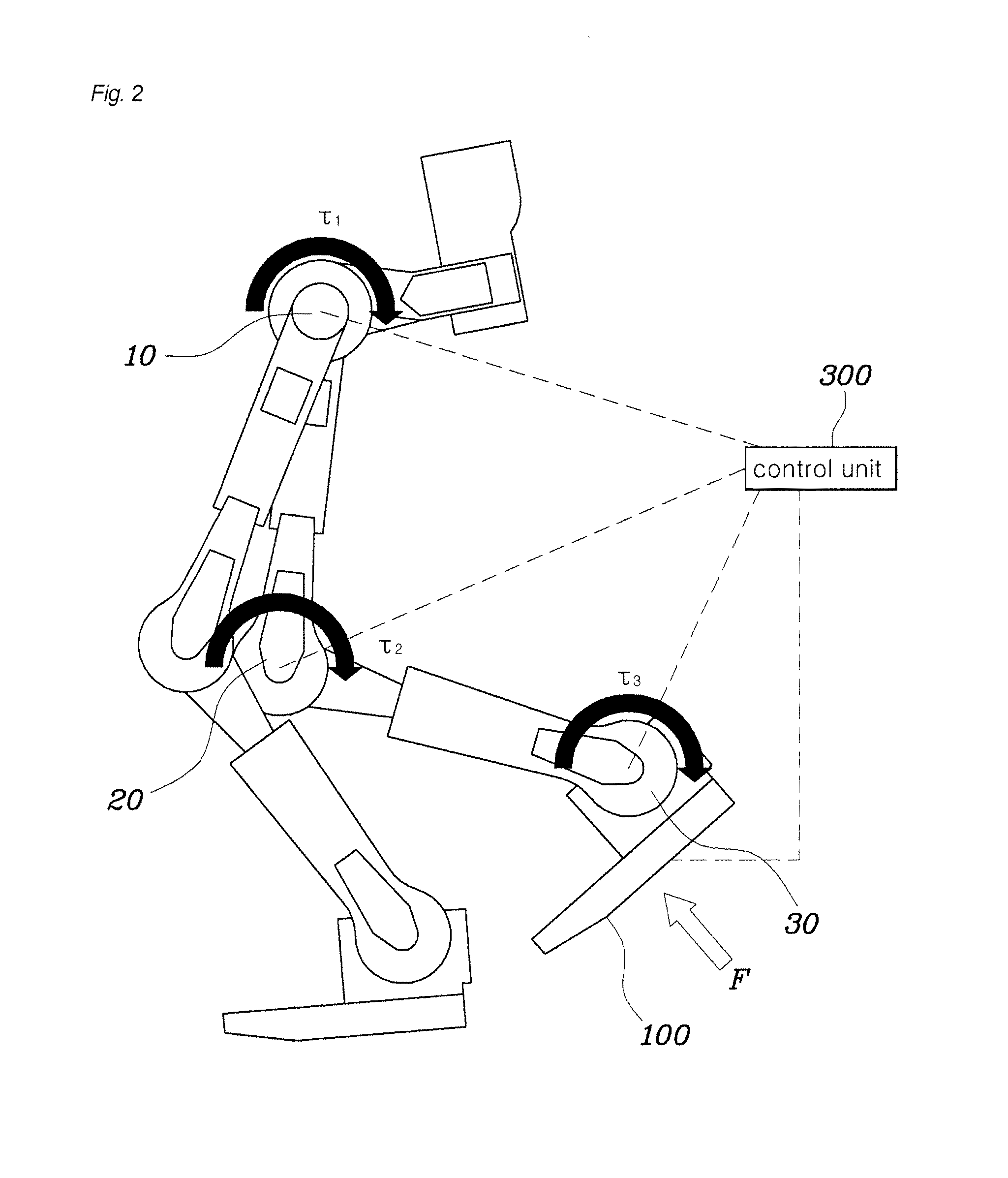
[0031]FIG. 1 is a view illustrating surface contact sensors used in a method for controlling the gait of a robot, according to an exemplary embodiment of the present disclosure. FIG. 2 is a view illustrating construction of a system for controlling the gait of a robot, according to an exemplary embodiment of the present disclosure. FIG. 3 is a flowchart of an exemplary robot gait control method according to the present disclosure. FIG. 4 is a graph showing a trigonometric function of the robot gait control method according to the present disclosure.
[0032]FIG. 3 is a flowchart of an exemplary robot gait control method according to the present disclosure. The robot gait control method includes a determination step S100 of determining whether the robot is in a walking state and determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More