

Smart active adaptive autonomous short distance manoeuvring & directional warning system with optimal acceleration for avoiding or mitigating imminent & inevitable side impact and rear end collision
a short distance manoeuvring and adaptive technology, applied in the direction of process control, pedestrian/occupant safety arrangement, instruments, etc., can solve the problems of reducing the reaction time to take preventive measures, reducing the time and space available, and requiring adequate stopping space at high speeds. , to achieve the effect of avoiding and mitigating imminent & inevitable side impact and rear end collision of vehicles, efficient utilisation of space around the vehicle, and high time and space sensitiv
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
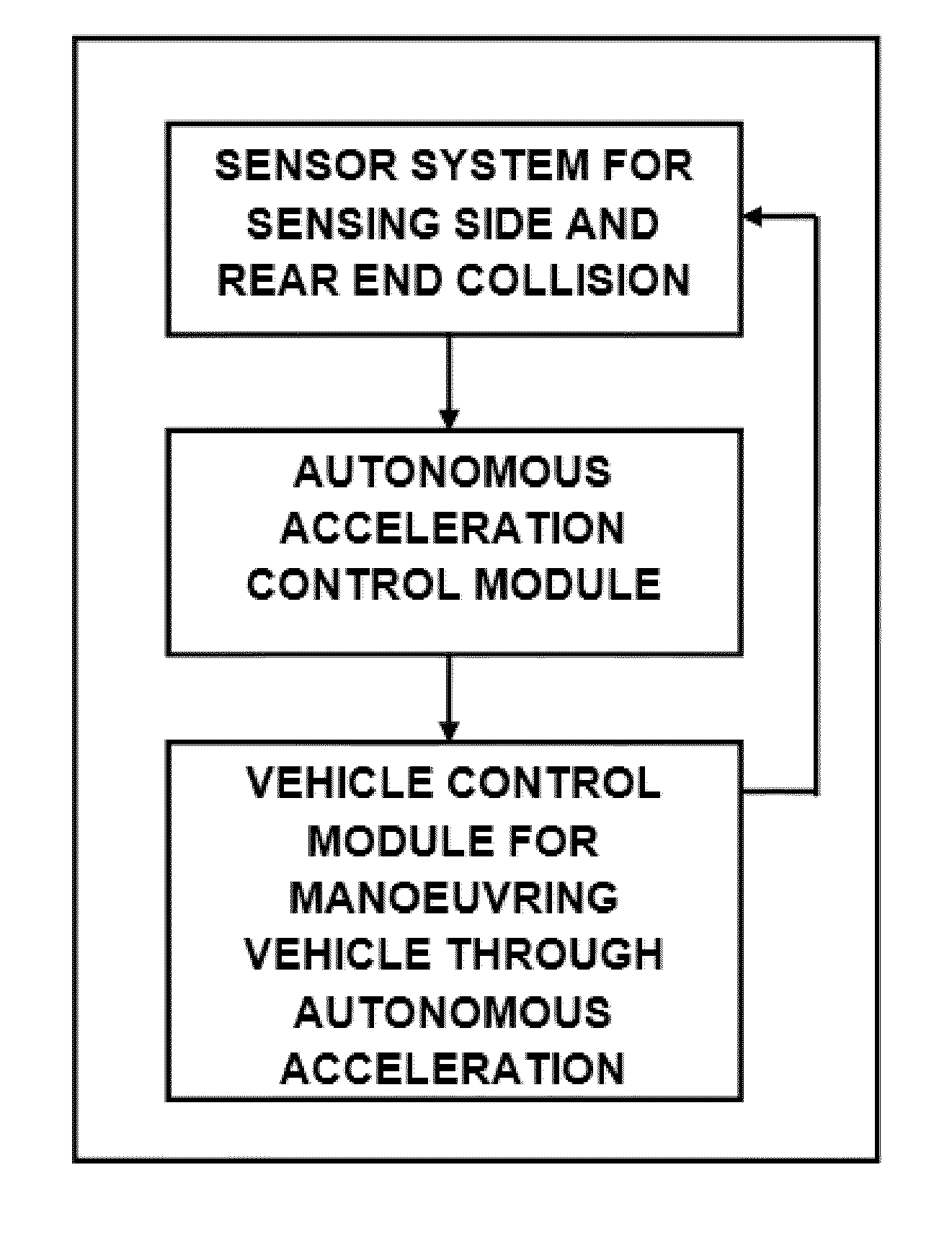
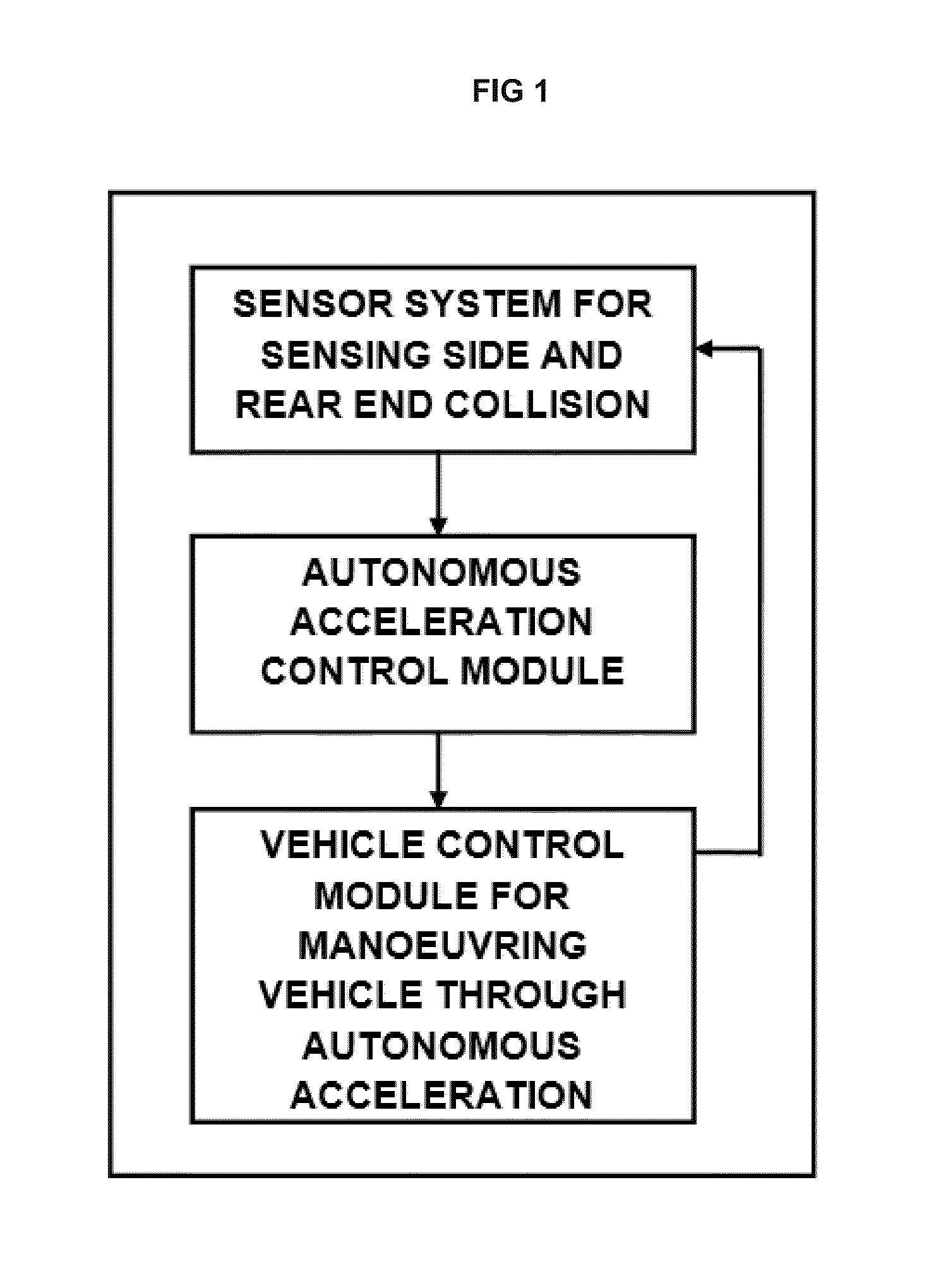
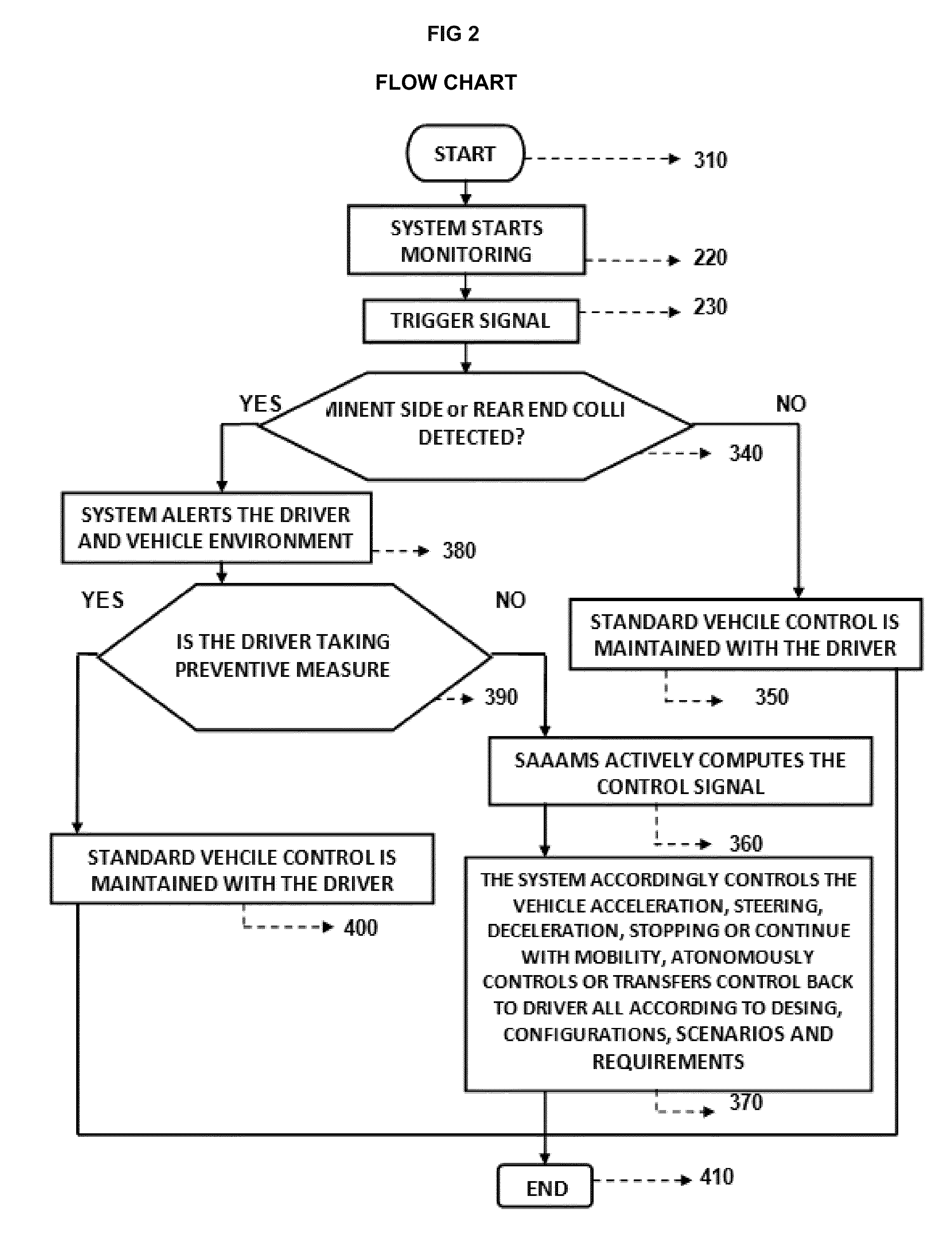
[0016]During an imminent and inevitable collision the environment and space around the vehicle plays a very important role in avoiding and mitigating side impact and rear end collision of the vehicles. So the whole aim of the system is to efficiently utilise the space around the vehicle in case of critical situations to avoid or mitigate inevitable or imminent collision through optimal acceleration. In critical situations the present system efficiently utilise the space around the vehicle through instantaneous and autonomous short distance manoeuvring with optimal acceleration & steering based on actively sensing environmental conditions thereby to provide space and time for other vehicle to react and utilise ultimately to avoid or mitigate the imminent and inevitable side impact and rear end collision. The system smartly senses, perform context aware computing in a closed loop processing manner and directing the vehicle through optimal acceleration and steering the vehicle in right...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More