

System and methods of detecting an intruding object in a relative navigation system
a technology of relative navigation system and intruder, applied in surveying and navigation, navigation instruments, instruments, etc., can solve the problems of uav control, limiting the flexibility of uav, and uavs being susceptible to intruders in the landing zon
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
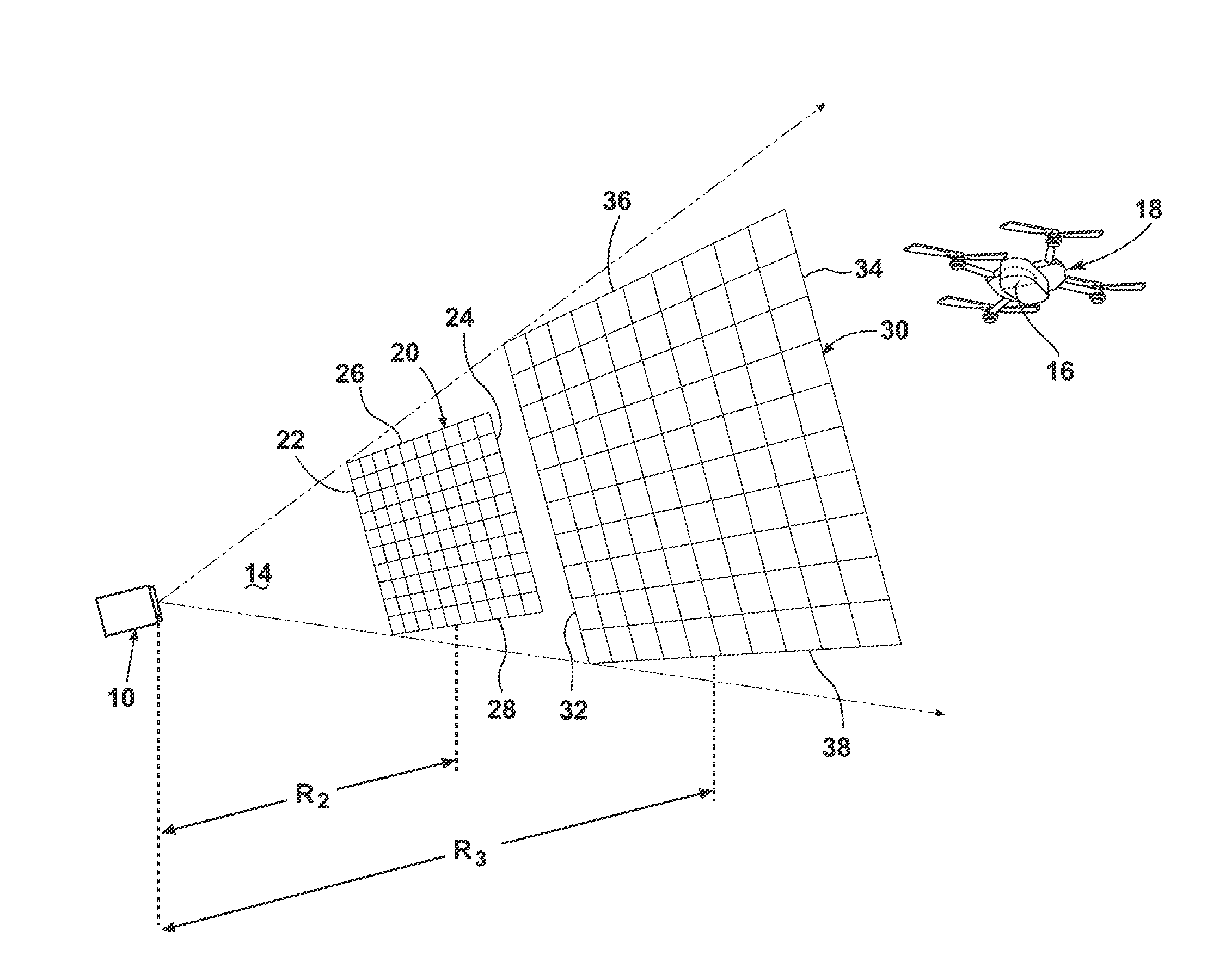
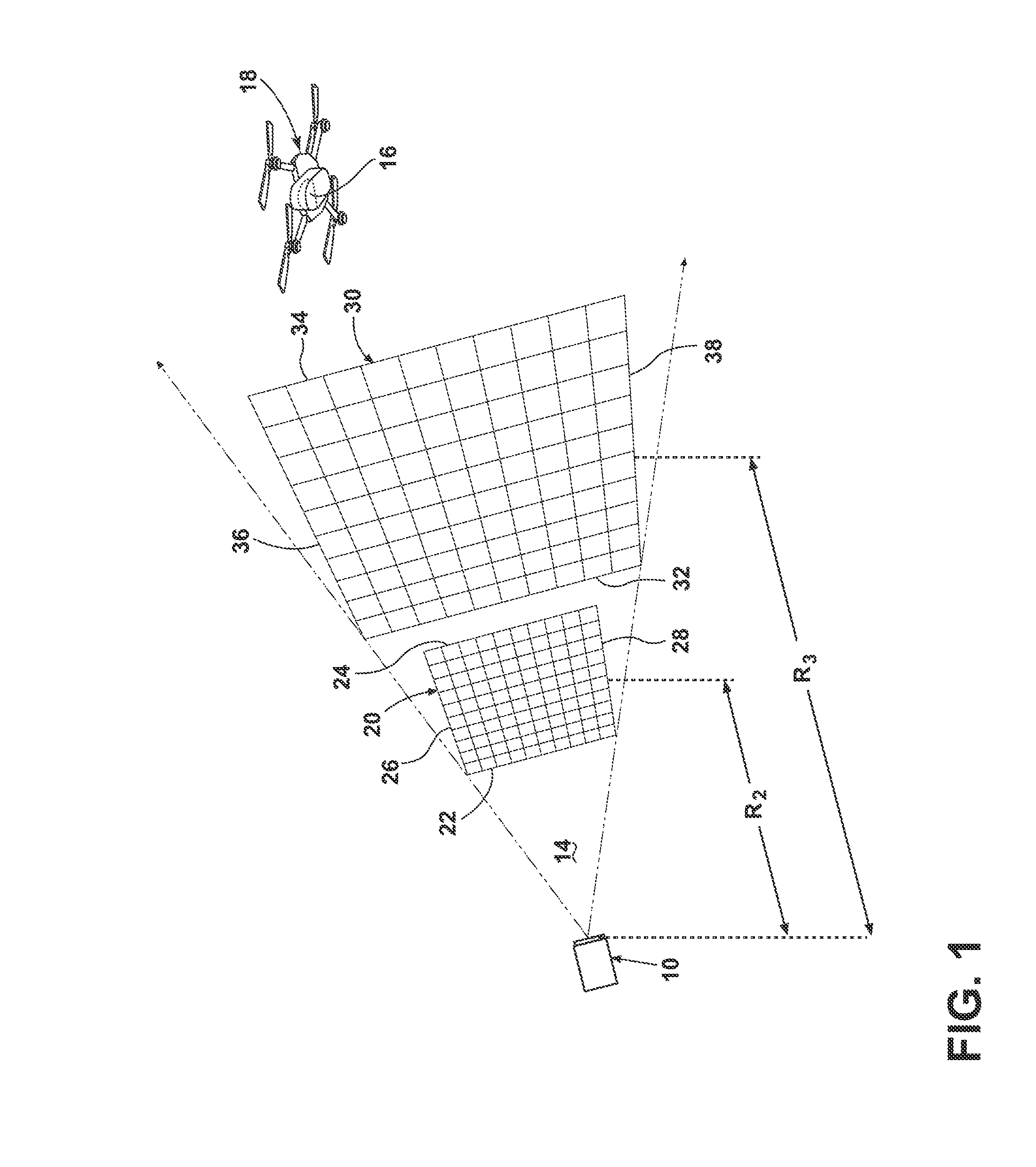
[0012]The embodiments of the present invention are related to methods and apparatus for projecting a grid from a grid generator of a relative navigation system and detecting intruding objects within the projected grid. The relative navigation system can be used for a variety of applications including landing any type of aircraft and is particularly well suited for landing UAVs. FIG. 1 illustrates an embodiment of a grid generator 10, which can project a grid, such as a set of intersecting lines, into space within a field such as a field of transmission or field of regard (FOR) 14. More specifically, the grid generator 10 repeatedly projects the grid into three-dimensional space to define the FOR 14. The general details of how to project the grid are known in the art, which include the disclosure in U.S. Pat. No. 7,681,839, issued Mar. 23, 2010, entitled Optical Tracking System For Refueling, and U.S. Pat. No. 8,386,096, issued Feb. 26, 2013, entitled Relative Navigation System, both...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More